III. ELEMENTOS PARA EL ANÁLISIS DE UNA IMAGEN DIGITAL.
| Los elementos subjetivos del paisaje, como son vistos por un observador, son cuantificados por un barredor multiespectral automatizado y sientan, con el conjunto de datos resultantes, las bases para un análisis objetivo de la escena con fines de gestión racional del paisaje. |
VEAMOS ahora los elementos básicos para el análisis de una imagen multiespectral
digital. Se ha dicho anteriormente que una imagen digital es la representación
lógica de una escena y que en general esta representación tiene forma numérica
y algunas veces visual. Se ha analizado también la mecánica de la captura y
registro de una escena en forma de imagen digital, pero, ¿qué significa físicamente
en su forma más general una imagen multiespectral digital? Esto es importante
para entender el mecanismo de análisis que se requiere para estudiar el funcionamiento
de una escena. Así pues, puede decirse que es la variación espacial y espectral
de la "energía luminosa" proveniente de aquélla. Este concepto es igualmente
válido cuando la escena emite o refleja partículas como protones o neutrones
o interacciona con señales acústicas, en cuyos casos la frase entre comillas
deberá leerse "energía penetrante" o "energía acústica". Para entender esto
hay que recordar que cuando un barredor multiespectral mide la energía luminosa,
penetrante o acústica) proveniente de un determinado CIV, obtiene
en forma simultánea un conjunto de números que dan en realidad el valor de la
energía luminosa vista a través de un conjunto de filtros de color, es decir
que se observa la variación de color a color para un mismo CIV.
La energía "luminosa" se refiere a luz visible e invisible, como la infrarroja
y la ultravioleta. Por su parte, aunque la energía penetrante, como la de un
haz de protones, y la energía acústica son seleccionadas por otros métodos diferentes
a los filtros de color, siempre se podrá hablar, en términos generales, de filtros
para obtener una energía determinada. Como la percepción remota utiliza principalmente
la energía "luminosa", se empleará este término con frecuencia, en la inteligencia
de que otros tipos de energía pueden ser también aprovechados por ella. Por
tanto, podemos decir que para un mismo CIV el barredor multiespectral
mide el cambio de color a color (o de energía), o bien la variación espectral
de la energía luminosa (penetrante o acústica) respectiva. Entendemos aquí por
variación espectral al cambio de energía de la radiación luminosa, penetrante
o acústica. A partir de esto es fácil comprender que de un CIV
a otro la energía luminosa será, en general, diferente y que, por tanto, la
imagen digital es la medida del cambio de dicha energía plasmada en el valor
de un pixel a otro, lo que quiere decir finalmente que el conjunto de valores
de los pixels de una imagen digital forman el cambio o variación espacial de
la energía proveniente de los CIV de la escena. Al desplazar un
punto de un lugar a otro sobre una imagen digital, se encontrarán diferentes
valores (Figuras 13 y 16) de los pixels, y esta variación espacial de la energía
luminosa traerá como consecuencia una variación espectral, ya que para cada
pixel se tiene un juego de valores que son la variación espectral del CIV
correspondiente en la escena. Las variaciones espaciales y espectrales están
tan estrechamente ligadas que el cambio de una implica la otra.
Ahora bien, al adquirir una serie de imágenes multiespectrales de una misma
escena, pero en diferentes tiempos, se tendrá registrada una variación temporal
de las características de aquélla, lo que implica que las imágenes digitales
correspondientes contendrán simultáneamente las variaciones espacial y espectral
de la energía proveniente de dicha escena a medida que ésta evoluciona en el
tiempo. Para continuar con el estudio de los elementos básicos de una imagen
digital con fines de análisis es necesario ahora introducir el concepto patrón
espacial y patrón espectral. Un patrón es esencialmente un arreglo de entes
sin tomar en cuenta la naturaleza de éstos. Puede afirmarse, por otro lado,
que el Universo está formado por patrones. Por su parte, un ente es cualquier
objeto físico o lógico; un número, una figura geométrica o una ave son ejemplos
de entes. Entonces, la sucesión de números 4, 17, 19, 16, es un patrón, diferente
desde luego al patrón 17, 4, 16, 19; queda claro en este ejemplo que lo que
importa es el orden que guardan los números entre sí y no si se trata de los
mismos o no. El número de entes en un patrón puede ser cualquiera entre dos
e infinito; así, por ejemplo, la sucesión 4, 17, 16, 8 será un patrón diferente
al primero ejemplificado aquí. La variedad de patrones es por tanto infinita,
pues cualquier combinación es posible. Es importante hacer notar también que
el arreglo de los entes puede ser de naturaleza lógica o física; en los ejemplos
que hemos mencionado se ha tratado del orden lógico de los números involucrados.
Si los entes son físicos, entonces el orden será también de naturaleza física,
y por tanto éste podrá darse a lo largo de un eje o sobre una superficie, como
sucede en el caso del arreglo de objetos en una escena. Es muy importante tener
presente que en la representación numérica de una imagen digital sólo podemos
hablar de patrones lógicos, no así en la representación visual de la misma imagen,
donde éstos tienen una equivalencia física. Veamos ahora estos conceptos aplicados
al caso de una imagen multiespectral digital (Figura 16). La sucesión de números
42, 48, 59, 63, representa la variación espectral del CIV correspondiente
a este pixel en la imagen digital; a esta sucesión de valores sobre los diferentes
planos que componen la imagen digital multiespectral se le llama patrón espectral;
dicho de otra manera un pixel representa un patrón espectral. Por lo tanto,
un patrón de este tipo está formado por la sucesión de valores que presenta
un CIV determinado cuando es visto bajo diferentes filtros y, como habíamos
dicho anteriormente, esta sucesión es única para cada objeto de la naturaleza,
de tal forma que dicho objeto tiene un patrón espectral único. De ahí que se
haya hecho costumbre llamarle firma espectral. (Figura 12.) Es claro
que la firma espectral de un objeto cualquiera es un patrón de tipo lógico.
En la figura 16 se ha dibujado también un conjunto de pixels con una cierta
variedad de valores; si bien en esta simplificación puede observarse con facilidad
que aquellos que tienen valores alrededor del 60 forman una figura geométrica
irregular, el resto tienen valores notablemente más bajos y como tales se constituyen
en una especie de fondo. El arreglo espacial de pixels con valores alrededor
del 60 forman lo que se conoce precisamente como patrón espacial. Es interesante
hacer notar, como ya se apuntó arriba, que en este ejemplo se trata de entes
de tipo lógico pero con un orden físico, es decir, tienen una posición definida
en el espacio. En una imagen multiespectral digital los patrones espectrales
son siempre de tipo lógico y los patrones espaciales son lógicos en la representación
numérica y físicos en la representación visual. Desde luego, hay patrones espaciales
formados por objetos físicos, como es el caso de un arreglo particular de aves
cuando éstas vuelan en una parvada, puesto que resulta suficiente con que una
ave cambie de posición relativa con respecto al resto para que el conjunto forme
un nuevo patrón. En forma intuitiva podemos decir también que desde el punto
de vista físico existen patrones tanto espectrales como espaciales (Figura 21)
que no difieren mucho entre sí. Así, por ejemplo, el patrón espectral 4,17,19,
16 es muy similar al 4, 17, 19, 15, y probablemente se trate de dos objetos
de la misma naturaleza física, pero con pequeñas diferencias. Entre patrones
espaciales también puede haberlas: únicamente mover de posición un solo pixel
del patrón espacial de la figura 17, se tendrá formalmente otro diferente, aunque
éste se parezca mucho al original.
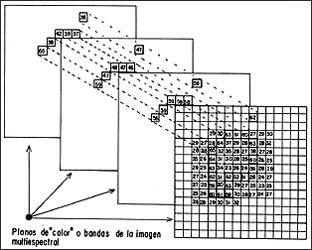
Figura 16. Patrones espacial y espectral de una imagen digital
multiespectral.

Figura 17. En esta imagen de un sensor aerotransportado se observa un conjunto
de patrones rectangulares que tienen características espectrales similares.
Estos patrones rectangulares son los asociados a una serie de edificios.
En la operación del barredor multiespectral, debido a variaciones de tipo estadístico,
pueden ocurrir pequeñas fluctuaciones en los valores respectivos para el patrón
espectral, aun en el caso de objetos iguales que se encuentren colocados en
diferentes posiciones de la escena. Algo similar puede suceder para patrones
espaciales, en donde la naturaleza discreta de la imagen hace que algunos pixels
queden ligeramente desplazados resultando pequeñas diferencias en la imagen
digital, aun cuando en la escena se trate de lo mismo. A estas fluctuaciones
estadísticas en el proceso de captura y registro de una imagen digital se suman
en general otros factores que pueden llegar a ser muy importantes. Por ejemplo,
en el caso de una imagen Landsat, la energía luminosa al viajar desde la superficie
terrestre al barredor multiespectral atraviesa la atmósfera, cuyas condiciones
de visibilidad pueden ser diferentes de un lugar a otro de la escena, de tal
manera que en la práctica las condiciones de iluminación para la escena no son
homogéneas. En el caso de una radiografía del tejido óseo, los rayos X atraviesan
el cuerpo humano, el cual presenta no sólo diferencias en el espesor sino también
diferentes condiciones del tejido blando, haciendo con esto que los huesos aparezcan
en diferentes tonalidades de gris; a esto hay que agregar el hecho de que los
huesos tampoco presentan condiciones de homogeneidad; así, el tejido óseo se
muestra con variaciones de densidad y espesor de un lugar a otro a lo largo
del cuerpo humano. Todos estos factores hacen que, tanto los patrones espectrales
como los espaciales de una imagen digital se vean formalmente diferentes, pero
con características similares, y son precisamente estas características las
que permiten la comparación e identificación de objetos semejantes en la escena.
Podemos decir ahora, que una imagen digital multiespectral es una composición
de patrones espectrales y patrones espaciales, y junto con la interrelación
que tienen éstos, es lo que constituye la estructura de una imagen digital multiespectral.
Esta interrelación se refiere a la relación que tiene el valor de un pixel con
sus vecinos, es decir, qué tan rápido varía el valor de un pixel a otro, y es,
por tanto, una medida de qué tan rápido se muestran visualmente las variaciones
en tonos de gris o de color en la representación visual de una imagen digital.
De hecho existe un número tan grande de posibles interrelaciones entre patrones,
que no hay manera de describir en forma exhaustiva la variedad de estructuras
que pueden resultar en una imagen digital de regular tamaño, digamos de 1 024
x 1 024 pixels. Para ilustrar esto supongamos que, como en un juego gigantesco
de rompecabezas, tenemos 1 024 x 1 024 (1 048 546) juegos de cuadros de 128
posibles tonos de gris, con lo que entonces podemos formar más de un millón
de imágenes con 128 niveles de gris, muchas de las cuales presentarán formas
familiares a nuestra vida diaria. Si tenemos muchos millones de pequeños cuadrados
con 128 posibles tonalidades, entonces podremos formar más imágenes de por ejemplo
1 024 x 1 024 pixels, pudiendo componer con esto casi cualquier figura que conozcamos
en la vida cotidiana. Por otro lado, es posible dar suficientes ejemplos para
esclarecer este tan importante concepto de estructura de una imagen digital,
como introducir los elementos básicos con los cuales descomponer una imagen
para facilitar no nada más su comprensión, sino también su análisis. Para esto
partamos de un ejemplo extremadamente sencillo: supongamos que tenemos una imagen
digital multiespectral cuyos pixels son del mismo valor o tono, es decir, la
imagen aparece homogénea a la vista. ¿Qué tipo de interrelación guardan en esta
imagen los patrones espectrales y espaciales? Pues bien, todos los patrones
espectrales tendrán el mismo juego de valores numéricos a lo largo de los diferentes
planos de color: por ejemplo, 7, 13, 17, 21 y 22, para una imagen multiespectral
formada por cinco bandas. La relación de pixel a pixel será muy simple: uno;
cualquier pixel será igual a sus vecinos. Veamos ahora un ejemplo un poco más
complejo: consideremos una imagen como la de la figura 16. En este caso existen
fluctuaciones relativamente pequeñas entre los patrones espectrales, tanto para
los pixels que forman la figura geométrica, como para el resto de la imagen
o fondo. La relación de un pixel con sus vecinos no es tan alta como en el caso
anterior, pero sí es cercana al 100%: casi igual a uno. En otras palabras, ya
sea para la figura geométrica o para el fondo, las fluctuaciones de pixel a
pixel son relativamente pequeñas, entre el fondo y la figura geométrica la relación
de los valores de los pixels es de aproximadamente 1/2, lo que implica que hay
un cambio brusco del fondo a la figura geométrica. Desde luego, esto significa
que la relación de los pixels que forman la figura geométrica con sus vecinos
(los del fondo) es realmente baja: aquí el cambio de un pixel a otro es bastante
brusco, pues esto es precisamente lo que define en forma clara la mencionada
figura, o visto desde otra perspectiva, los pixels que forman el fondo tienen
poco que ver con aquéllos que forman la figura geométrica. De aquí podemos plantear
que, en el primer ejemplo, donde consideramos una imagen homogénea, la estructura
es la más simple que puede existir, y en el segundo (Figura 16), que la estructura
es algo más compleja, esto es que es de tipo binario: sólo existen dos patrones
espaciales o dos grupos de patrones espectrales. Analicemos ahora imágenes con
estructuras más complejas y para esto vayamos a la figura 10, en la que vemos
en tonos de gris y con variaciones suaves el rostro de una mujer: ¿cómo podemos
afirmar que diferenciamos el patrón espacial "ojos, boca o nariz"? En estos
casos un mismo patrón espacial no presenta fronteras tan definidas ni un nivel
de valores tan homogéneos como aquellos patrones de la figura 16. Por tanto,
en primer lugar podemos afirmar que los mencionados patrones del rostro de la
mujer se encuentran embebidos en un contexto que es precisamente el rostro,
y en segundo, que el cerebro humano es capaz de suplir aquellas partes faltantes
o poco claras del patrón en cuestión. Esto quiere decir que distinguir dichos
patrones está íntimamente relacionado con un proceso cerebral que aún no se
encuentra claramente entendido; en otras palabras, la determinación o no de
un patrón espacial no se debe nada más a su existencia física, sino también
al proceso o método de análisis de la imagen y, como el proceso cerebral mencionado
no se encuentra completamente clarificado, podemos afirmar que el reconocimiento
o no de un patrón espacial puede finalmente constituirse como un hecho subjetivo
y, como tal, depende del observador, del barredor multiespectral, de las condiciones
de iluminación de la escena, del tamaño del CIV en relación con
ésta y del método de análisis. No puede obviarse esta subjetividad diciendo
que un patrón espacial podrá reconocerse automáticamente por medio de una computadora,
puesto que los algoritmos computacionales para hacer dicho reconocimiento los
tiene que escribir un ser humano, que es quien va a plasmar en tales algoritmos
criterios de carácter subjetivo. ¿Qué podemos decir entonces acerca de estructuras
más complejas? Podemos afirmar tres cosas: 1) siempre habrá en una imagen digital
patrones espaciales bien definidos tanto en su forma y su frontera, como en
la extensión que ocupan, los que podrán distinguirse sin ambigüedad ya sea por
cualquier observador, o por una computadora debidamente programada; 2) ciertos
patrones aparecerán como aquéllos de la figura 10, en donde es necesario el
manejo de elementos subjetivos para identificar los patrones espaciales sin
ambigüedad; claramente será indispensable introducir, debido a tal subjetividad,
un conjunto de reglas que unifiquen en forma arbitraria, pero práctica, dichos
elementos y 3) un conjunto relativamente pequeño de patrones para los que no
es posible un análisis sin caer necesariamente en ambigüedades, de tal forma
que el reconocimiento de esta clase de patrones es realmente circunstancial;
para este tipo de patrones se requiere por tanto de una unificación de criterios
y condiciones bajo las cuales se debe capturar la imagen digital correspondiente
a la escena que se desee analizar. Por ejemplo, ciertas condiciones de iluminación
pueden hacer aparecer a una imagen con sombras pronunciadas impidiendo la definición
clara de varios patrones espaciales.
Puede afirmarse ahora que los patrones espectrales siendo lógicos y por tanto bien definidos no presentan finalmente ningún grado de subjetividad, puesto que ésta ha sido ya previamente clarificada a través de axiomas y definiciones concernientes al sistema de números naturales. De ahí que el patrón espectral 4, 17, 19, 16 sea clara y definitivamente diferente a cualquier otra combinación de cuatro números naturales y por tanto esté constituido en un patrón espectral único. Ahora bien, como ya habíamos comenzado a estudiar en el párrafo anterior, la situación para los patrones espaciales no es tan sencilla cuando se trata de imágenes con estructuras relativamente complejas. En relación a esto habíamos mencionado que existen tres grados o clases de patrones de esta clase de acuerdo a la objetividad o subjetividad involucrada en su reconocimiento y que los tres podían estar presentes en una imagen digital, lo que traía como consecuencia que la interrelación entre un patrón espacial y el resto de la imagen, o bien entre un patrón y otros, ya no sea tan sencilla como el que tiene el patrón geométrico de la figura 16 con el resto de la imagen. En casos más complejos, la interrelación es variable de un pixel a otro y de un patrón espacial a otro, como sucede por ejemplo en una radiografía, en donde tanto una costilla va cambiando de tono de un lugar a otro, como la relación entre un pixel-costilla y un pixel-tejido blando. En la práctica, esta variedad en los patrones espaciales hace que se impongan necesariamente reglas en el proceso de captura y registro de imágenes, reglas tales que garanticen la uniformidad en las características de una clase de patrones, al menos para un conjunto específico de ellas como lo pueden ser las radiografías o las imágenes satelitarias. Supongamos ahora que se han ya uniformizado los criterios para un cierto conjunto de imágenes multiespectrales y que se han establecido reglas para evitar al máximo la ambigüedad. Hecho esto podemos plantear fácilmente que la estructura de una imagen multiespectral está dada por el conjunto de patrones espectrales y espaciales que la componen y por la interrelación que guardan entre ellos, siendo esta interrelación la razón de valores numéricos que un determinado pixel guarda con todos sus vecinos en cada una de las bandas de la imagen. En una imagen como ésta dicha razón será diferente de un plano de la imagen a otro, aun cuando se trate del mismo pixel. Así, por ejemplo, suponiendo dos pixels contiguos cuyos valores a través de los diferentes planos de color de una imagen multiespectral forman los patrones espectrales 4, 17, 19, 16 y 8, 15, 13, 10, tendrán la razón de valor 1/2 para el primer plano, pero una razón diferente para los planos segundo, tercero y cuarto respectivamente 17/15, 19/13 y 8/5. La interrelación de los pixels que componen un patrón espacial con los pixels vecinos es muy importante, puesto que si la razón es cercana a uno, el patrón difícilmente podrá distinguirse, mientras que si la razón es diferente de uno, tendrá un contraste mayor con respecto al resto de la imagen y será fácil identificarlo. Es necesario decir que dado que dicha razón cambia de plano a plano, es posible que un patrón sea identificable en un plano pero no en otro. Hay que puntualizar aquí, que sólo es importante para la diferenciación de un patrón espacial, la razón de los pixels que lo componen con los pixels vecinos próximos; no tiene sentido hablar de la razón de tales pixels con vecinos alejados, puesto que éstos no contribuyen al contraste del patrón espacial en cuestión.
Otra manera de ver a un patrón de este tipo es a través del concepto de estructura, es decir considerando a un patrón espacial como una estructura elemental que forma parte de una imagen o estructura compleja. Por tanto, una imagen digital multiespectral podrá ser vista como la superposición de estructuras elementales o semielementales cuya forma y tamaño se mantiene, en principio, de plano a plano de color, pero cuya interrelación cambia en forma dependiente a la variación espacial de los valores de los pixels que componen dicha estructura. Esto significa que un plano de color determinado conteniendo una estructura elemental podrá tener buen contraste, pero que, en otro plano, éste será de tal magnitud que, o aparecerá en forma tenue, o tal vez ni siquiera pueda distinguirse. De hecho no existe un juego básico de estructuras elementales; la variedad de patrones espaciales es tal que hace imposible la definición de dicho juego. Más bien lo que se establece es un conjunto característico o típico de estructuras elementales con relación a una aplicación específica, con lo que, por ejemplo, tratándose del problema de la forma de un determinado virus, no se manejarán todas las formas posibles que éste adopta a lo largo de su existencia, sino más bien un subconjunto suficiente para determinar, digamos, la forma que adquiere cuando se encuentra en un claro estado de virulencia. En resumen, establecer un conjunto de estructuras elementales se hace por medio de una decisión arbitraria, pero con sentido práctico; en la suposición, claro está, de que los criterios para la identificación unívoca de tales estructuras han sido ya seleccionados y cuantificados. En una imagen de la superficie terrestre tomada desde un satélite, los diferentes patrones de drenaje del agua que escurre hacia las partes bajas podrían ser consideradas como estructuras elementales. También lo serán las formas de las cadenas montañosas cuya forma y tamaño son relevantes en la exploración geológica. Los diferentes tipos de cobertura vegetal pueden ser también consideradas como patrones espaciales elementales; éstos, combinados con información a la cual se encuentran localizadas las diferentes especies vegetales, forman elementos de considerable importancia en el estudio de la superficie terrestre y los recursos naturales. De hecho, cuando el hombre observa con la vista al medio que le rodea, establece de inmediato un conjunto básico de patrones o estructuras elementales, lo que hace en forma arbitraria, pero con sentido práctico, dependiendo del contexto en que se encuentre; así, por ejemplo, un transeúnte en la calle definirá a los automóviles como estructuras elementales, pero un mecánico en su taller verá el automóvil como una estructura compleja y a las diferentes partes del motor y la carrocería las verá como estructuras elementales. A manera de recapitulación de estas ideas podemos decir que una imagen digital multiespectral está formada en su totalidad por un conjunto de patrones espaciales complejos, tantos patrones como planos de color haya, y que cada plano es, a su vez, el resultado de la interrelación de estructuras espaciales semielementales o cuasielementales, definidas éstas de acuerdo al contexto en el cual se desea analizar dicha imagen.
Ahora bien, por medio de la visión y del sentido del tacto un ser humano es
capaz de distinguir en forma intuitiva diversos tipos de textura. En
una muestra de diferentes telas, se puede establecer una clasificación cualitativa,
desde las más rugosas hasta las más lisas. ¿Cuáles son los criterios que se
utilizan en esta clasificación? Una tela completamente lisa es aquélla que no
presenta ninguna variación del relieve a la hora de deslizar los dedos por su
superficie; esto quiere decir que si viéramos a la tela de perfil, la veríamos
completamente plana, como la superficie de un vidrio; en cambio, una tela rugosa
presentará variaciones abruptas en todas las direcciones, y de perfil se verá
una línea accidentada. Sin embargo, la textura no puede entenderse únicamente
como un cierto grado de rugosidad, en ella también interviene el tipo de variación
de tal rugosidad y en qué dirección o direcciones se presenta ésta. De esta
manera, una sucesión lineal de crestas y valles no será lo mismo que un cuadriculado
de crestas y valles; el número de posibles combinaciones para dichas variaciones
es prácticamente ilimitado. Puede decirse entonces que el patrón espacial que
presenta la rugosidad en una tela es lo que determina la textura de la misma,
o en otras palabras, la rugosidad de una tela se presenta a la vista como una
sucesión de tonos que forman un patrón espacial y esta sucesión tiene una correlación
estrecha con la rugosidad perceptible al tacto. ¿Qué puede decirse ahora en
cuanto a la textura de una imagen digital? En una imagen continua no podemos
hablar directamente de rugosidad, sólo podemos hacerlo de cambios de tono de
color a medida que uno se desplaza de un punto a otro de la imagen. Sin embargo,
en una imagen digital podemos imaginar cuantitativamente que aquellos pixels
que tienen un valor alto forman un pico o cresta y que los que tienen un valor
bajo forman un valle o sima, de tal manera que puede establecerse una analogía
clara entre la rugosidad de una tela y esta "rugosidad" imaginaria de la imagen
digital. Recordemos ahora que una imagen de este tipo tiene una representación
visual, y que los pixels de valor alto se traducen en tonos claros y los de
valor bajo en tonos oscuros, de aquí que finalmente las variaciones espaciales
en tono o color de una imagen digital pueden entenderse como un cierto grado
de "rugosidad" o textura. Veamos ahora algunos ejemplos para ahondar en estos
conceptos de tipo intuitivo y difíciles de cuantificar.
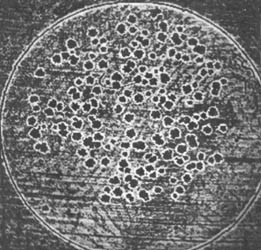
Figura 18. Imagen obtenida de un detector plástico donde se observa
una serie de patrones circulares que corresponden a partículas a.
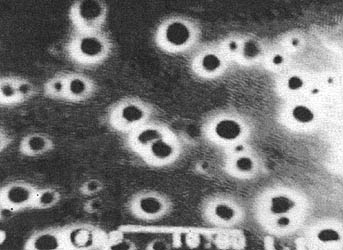
Figura 19. Los patrones circulares de esta imagen corresponden
a las trazas de partículas vistas a través de un microscopio electrónico.
Comencemos por las imágenes mostradas en las figuras 18 y 19 que presentan
estructuras o patrones espaciales relativamente sencillos. En ambas figuras
se pueden apreciar una serie de patrones circulares oscuros rodeados de un halo
bastante claro; de acuerdo a los conceptos que acabamos de desarrollar podemos
decir que tanto los patrones circulares como los halos tiene la misma textura
y con esto queda asentado algo muy importante: la textura es independiente del
tono o color de la imagen, ya que en este ejemplo la variación espacial de los
tonos de gris es la misma aunque en un caso sea clara y en el otro oscura. En
la figura 18 se puede ver una sucesión de líneas algo oscuras aproximadamente
paralelas y separadas entre sí por zonas un poco más claras. Las regiones que
contienen estas líneas serán catalogadas como una clase de textura aparte; también
serán clasificadas de esta manera aquéllas que tienen una especie de "moteado",
en donde se alternan, en forma aproximadamente regular y en todas direcciones,
una sucesión de pixels oscuros y grises. En la figura 18, por tanto, diremos
que hay tres clases de textura y, siguiendo razonamientos similares, lo mismo
podríamos decir de la figura 19. Algo un poco diferente se tiene en la figura
20; en ella se ven, en una especie de cuadriculado, una serie de patrones espaciales,
donde cada cuadrado tiene estructuras rayadas y "moteadas" además de que se
pueden apreciar también algunas zonas muy claras, de las cuales se podría plantear
que tienen una textura "lisa". No obstante estas clasificaciones intuitivas,
resta algo de subjetividad en el concepto de textura, puesto que el cuadriculado
de la figura 20 que contiene a las otras clases de textura, puede ser una clase
de por sí; de aquí que este concepto dependa siempre del contexto bajo el cual
se le mire. Aun así podemos decir que existen tres elementos objetivos en el
concepto de textura, y es que ésta depende de: 1) la frecuencia de cambio de
los tonos en los pixels; 2) de la dirección o direcciones de cambio, y 3) del
contraste entre un pixel y sus vecinos.

>
Figura 20. Zona de cultivos en el valle del Yaqui, Sonora, captada
por el satélite Landsat 2.

Figura 3. Imagen de la glándula tiroides obtenida con un detector de rayos
gamma. La parte superior es una representación de dicha glándula en tonos de
grises y en la parte inferior se aprecia la misma en colores; es evidente que
la representación a color es mucho mejor.
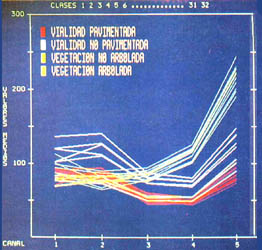
Figura 12. Muestra de cuatro "firmas espectrales" extraídas de los valores asociados a diferentes rasgos de la imagen de la ciudad de México, obtenida por un sensor aerotransportado.

Figura 14. Imagen del satélite Landsat (TM) del área donde está localizado
el reactor nuclear de Chernobyl (ver flecha). La imagen fue tomada el 29 de
abril de 1986, a las 18:52 hora local). La región central de la imagen que aparece
en negro es el estanque de enfriamiento asociado a la operación del reactor.

Figura 26(a). En la parte inferior de esta imagen del Valle del Yaqui, Sonora,
se aprecia una delgada nube que impide ver con claridad los cultivos y los canales
de riego.
Figura 26(b). En esta imagen, la nube ha sido filtrada, habiéndose recobrado
buena parte de la información que estaba cubierta por la nube.
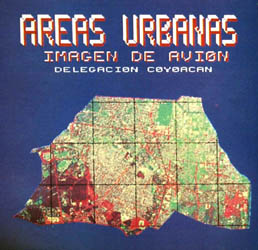
Figura 28(b). Este es el tipo de productos que se puede ofrecer la percepción
remota en la cartografía de una ciudad como México. En los diferentes colores
se ven las comunicaciones viales, las zonas urbanas y las zonas arboladas.
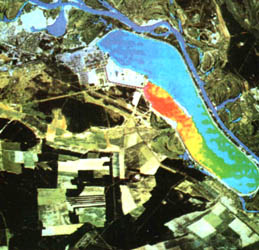
Figura 29(a). En esta toma del reactor de Chernobyl, antes de su explosión,
se aprecia en rojo la descarga de aguas calientes producto de la operación del
reactor. En amarillo, verde y azul se observan las aguas gradualmente más frías,
con lo que queda clara la distribución particular de temperaturas del estanque
de enfriamiento.

Figura 29(b). Después del accidente en el reactor nuclear, la distribución
de temperaturas del estanque es más uniforme, lo que indica que el reactor ha
cesado de operar puesto que ya no hay descarga de aguas calientes.

Figura 30. La apariencia rojiza de la cobertura vegetal de esta imagen se debe a que se utilizó un filtro infrarrojo y esto permite evaluar con facilidad el estado de la vegetación.
Pasemos ahora a estudiar otro elemento básico para el análisis de una imagen
digital: la noción de forma de un patrón espacial. El concepto de forma tiene
más aspectos objetivos que el concepto de textura, ya que todos entendemos la
diferencia entre un triángulo y un cuadrado debido a que estas figuras tienen
propiedades geométricas bien definidas que nos permiten determinar sus diferentes
formas en una imagen digital, cuando se trata de figuras geométricas regulares
e irregulares es posible distinguir una forma de otra, puesto que una figura
geométrica siempre puede verse como un polígono con ángulos interiores y lados
claramente definidos. Cabe aclarar que la naturaleza discreta de una imagen
digital hace imposible que puedan considerarse líneas continuas para figuras
geométricas; éstas estarán siempre representadas por líneas quebradas o polígonos.
Esto puede verse claramente al referirnos a la figura 21, en donde, por simplicidad
en la discusión, se ha representado una figura binaria (sólo dos valores de
pixels) y en donde los unos representan el contorno de una figura geométrica
cualquiera. Consideramos también el diagrama de ocho posibles direcciones que
pueden presentarse en una imagen digital y que se conoce como código de Freeman.
Por medio de este código y comenzando por cualquier pixel de la figura geométrica,
digamos el de la extrema derecha, podemos asociar una cadena de números a dicha
figura. El proceso de asociación es como sigue: el pixel remarcado en la figura
21 es el que se toma como punto de partida.
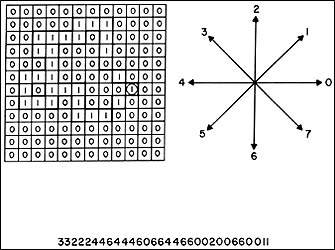
Figura 21. Patrón espacial y su correspondiente representación numérica por medio del código de Freeman.
Se inicia un recorrido hacia arriba en sentido contrario a las manecillas del reloj y se va asignando un número según el código de Freeman; de esta manera, al siguiente pixel se le asigna el número tres, ya que se encuentra en la dirección tres del mencionado código. El pixel que sigue se halla en la misma dirección y por tanto se le otorga también el número tres; el siguiente se encuentra hacia arriba, por lo que se le asigna el número dos. El proceso se continúa hasta recorrer completamente los pixels que componen la figura geométrica; en este caso la cadena asignada resultante se muestra en la figura 21. Con esta cadena de números o código de Freeman hemos logrado un resultado muy importante, puesto que en ella se encuentra la información cuantitativa acerca de la forma de la figura geométrica; haber planteado las cosas así permite objetivar el concepto de forma aun para polígonos irregulares. Analicemos ahora con más detalle esta cadena de números para verificar que esta representación numérica de la forma es realmente única para el ejemplo planteado y que no existen ambigüedades en el esquema planteado. En primer lugar, esta cadena de números constituye un patrón espacial (recuérdese que un patrón es un arreglo de entes de la misma naturaleza lógica, que se refiere al espacio físico), puesto que recorrimos la figura geométrica de pixel a pixel, es decir de un punto a otro en la representación visual de la imagen digital. ¿Qué sucede si la cadena la construimos a partir de otro pixel, digamos el que se encuentra en el extremo superior derecho de la figura geométrica? Con la convención de hacer el recorrido en el sentido contrario a las manecillas del reloj, se obtiene la siguiente cadena: 44644460664466002006600113322. ¿Acaso es esta cadena esencialmente la misma que la anterior? ¿se trata del mismo patrón? Hablando superficialmente y en el contexto en el cual definimos a un patrón la respuesta parecería ser no. Sin embargo, estamos considerando un patrón espacial y por tanto tenemos que pensar en la posición relativa que guarda cada pixel de la figura geométrica; además, no olvidemos que la cadena obtenida representa un patrón espacial y no un patrón lógico, en el cual el cambio de un solo ente implica un patrón realmente diferente. Con estas consideraciones pasemos ahora a comparar las dos cadenas y para ello iniciemos el siguiente proceso de rotación: comenzando con el número de la extrema derecha de la última cadena, pasémosla al principio de la misma, a la izquierda de ésta, y comparemos número a número las dos cadenas; así continuamos pasando número a número los elementos de la segunda cadena y comparándolas entre sí cada vez, es claro que después de haber pasado a la izquierda los números 33222, las dos cadenas serán exactamente iguales. En este momento podemos decir que si dos cadenas de dos figuras se comparan idénticamente una vez durante una rotación completa de los números de cualquiera de las dos, entonces las dos figuras tienen la misma forma, es decir constituyen el mismo patrón espacial, ya que los pixels guardan la misma posición relativa, aun cuando se rote la figura. En otras palabras, esta conceptualización de las formas para las figuras geométricas hace también que la representación respectiva, por medio de las mencionadas cadenas, sea independiente de la orientación de la figura, puesto que al girar la Figura 21, se obtiene una cadena igual a la que corresponde a la figura no girada, por supuesto, una vez hechas las rotaciones necesarias en cualquiera de ellas. El último problema que tenemos que resolver es el relativo al tamaño de las figuras geométricas que se consideren, ya que intuitivamente sabemos que la forma de una figura es independiente de las dimensiones de ésta; este concepto queda completamente clarificado cuando se amplifica el negativo de una fotografía a diferentes escalas: obviamente las formas de las figuras presentes en la foto serán las mismas independientemente del tamaño de las impresiones correspondientes. Para estudiar este último problema supongamos que tenemos dos rectángulos concéntricos (5 x 4 y 7 x 6 pixels), con lo que aseguramos que sean de la misma forma pero de tamaño diferente; entonces, siguiendo el código de Freeman, las cadenas correspondientes serán: 00002224444666 y 0000002222244444466666, que se obtiene comenzando con el pixel del extremo izquierdo inferior y recorriendo los rectángulos en sentido contrario a las manecillas del reloj. Las cadenas así obtenidas lucen similares, mas no iguales; si hiciéramos una comparación como la planteada más arriba, concluiríamos erróneamente que las figuras consideradas tienen formas diferentes. Sin embargo pueden observarse que estas dos cadenas tienen estructuras semejantes: los dígitos 0, 2, 4, 6 que intervienen en ambas guardan una relación de proporción en cuanto al número de veces que aparecen en cada cadena. Esto es así debido a que al aumentar de tamaño el rectángulo se requieren de más pixels para representar cada lado y en consecuencia la cadena que caracteriza la forma correspondiente será proporcionalmente más grande. Es necesario aclarar que a diferencia de las posibles orientaciones que puede tener una figura donde los patrones espaciales correspondientes son los mismos, en el presente caso, donde los patrones respectivos son verdaderamente diferentes, éstos resultan ser semejantes gracias a que están relacionados a formas iguales. Lo que hemos hecho finalmente es introducir una conceptualización lógica que nos permite comparar dos formas de manera cuantitativa. En resumen, podemos decir que una cadena de números, producto de aplicar el código de Freeman a un polígono cualquiera en una imagen digital, representa de manera adecuada y cuantitativa la forma asociada a dicho polígono, de tal manera que esta representación es independiente de la orientación y tamaño que pudiera tener dicho polígono. Así pues para comparar una forma con otra será necesario analizar la proporción de los dígitos que aparecen en las cadenas respectivas, efectuar todas las rotaciones requeridas y comparar dígito a dígito las dos cadenas: las formas serán iguales, si aquéllas son semejantes, y serán progresivamente diferentes a medida que difieran dígito a dígito. Cabe anotar aquí que aunque lógicamente se ve sencillo comparar dos formas o clasificarlas de acuerdo a un patrón de formas, la tarea computacional se vuelve sumamente difícil, pues la implantación de los algoritmos correspondientes a las rotaciones, proporciones y comparaciones no es directa ni obvia. Lo importante, sin embargo, es que en principio podemos cuantificar el concepto de forma y que éste resulta ser un elemento de extrema importancia en el análisis de imágenes digitales.

Figura 22. Banda de una imagen multiespectral sintetizada en un conjunto de
estructuras quasielementales.
Imaginemos ahora que tomamos un plano cualquiera de una imagen multiespectral en la cual se encuentra una estructura espacial relativamente compleja. Pensemos también que hemos logrado conceptualizar esta estructura de tal manera que es posible sintetizarla por medio de un conjunto de estructuras quasielementos (figura 22). En el plano original se muestra una imagen donde están representados una montaña, un bosque, un lago y una red de drenaje por donde fluye el agua que escurre desde la montaña. En la sucesión de imágenes mostradas en la figura 22, aparecen cada uno de estos patrones espaciales o estructuras quasielementales. Como se había dicho anteriormente, en la práctica estos patrones pueden no aparecer ni tan claros ni tan bien definidos como se muestran en la figura. La síntesis mencionada consiste básicamente en que cada estructura quasielemental ha sido aislada o separada del resto de la imagen original y puesta en una imagen aparte; a este proceso se le llama segmentación de la imagen digital. En otras palabras, la segmentación es la representación de una estructura compleja por medio de un conjunto de estructuras quasielementales. Cabe preguntar aquí: ¿cuál es el objeto de segmentar una imagen digital? Aparte de conceptualizar una estructura compleja en sus partes, lo cual es muy útil puesto que el desglose de cualquier objeto en sus componentes básicos es un método de estudio bien establecido, se tienen otras consecuencias importantes en el análisis de una imagen digital. Al separar cada objeto estamos en posibilidades de evaluarlo en forma automatizada sin tener complicaciones innecesarias en la ejecución de algoritmos computacionales; al evaluar la forma del bosque, la montaña o el lago, lo hacemos por separado sin tener que escribir un programa de computadora que "reconozca" que se trata de tres objetos diferentes. Además de que si bien para fines cuantitativos la forma de un bosque puede ser la misma que la de un lago, no es así para las consecuencias que trae una forma determinada en el área de la silvicultura o en el de la geohidrología, respectivamente. Por otro lado, es muy posible que se desee o se requiera aplicar diferentes criterios de análisis a diferentes estructuras: así, por ejemplo, será necesario determinar el área boscosa y la superficie cubierta por el lago, pero para el caso de la montaña será más importante determinar su forma y para la red hidrológica el número de cauces por unidad de superficie que permita obtener el flujo de agua hacia las partes bajas. Podemos ahora decir que la segmentación de una imagen no es nada más un recurso lógico para conceptualizar una estructura compleja, sino también un recurso para simplificar el análisis computacional de las propiedades geométricas de las estructuras quasielementales. Las propiedades geométricas de un patrón espacial, tales como forma, perímetro, área cubierta y textura, son las que constituyen la morfología de tal patrón, y su determinación es necesaria en la solución de problemas específicos. La morfología de un tumor, por ejemplo, puede ser indicativa del tipo de tejido y de la malignidad correspondiente, y la morfología de una cadena montañosa puede dar indicios sobre la historia geológica de una región determinada. No es necesario que la segmentación se realice en forma física; en muchos casos es suficiente una separación lógica, en donde a cada estructura quasielemental se le asigne un plano virtual; esto es, sólo existe una representación numérica de las estructuras y a esta representación se le asigna un código diferente que simboliza un plano virtual determinado.
Un patrón espacial en una imagen digital multiespectral es en realidad un conjunto
de patrones espectrales con características similares. Para clarificar esto
y estudiarlo con mayor detalle regresemos a la figura 16, la cual muestra un
patrón espacial simple que bien podría catalogarse como una estructura quasielemental.
A lo largo de este patrón, las características de los patrones espectrales son
aproximadamente las mismas, por lo que los juegos de números que los representan
son muy parecidos entre sí a través de los planos de color de la imagen multiespectral.
En la figura 16 se han representado cuatro patrones espectrales, contiguos entre
sí, que forman parte del patrón espacial; estos juegos de números son, yendo
de izquierda a derecha sobre la imagen digital, los siguientes: (64, 59, 47,
38), (63, 59, 48, 42), (61, 58, 47, 39) y (60, 58, 46, 37). Es claro que podemos
esperar juegos parecidos para el resto de los patrones espectrales que conforman
al patrón espacial mostrado en la figura 16. Con todo existen pequeñas diferencias
entre estos patrones que podríamos atribuir a variaciones provenientes del sensor
remoto o a cambios ligeros del objeto correspondiente en la escena. Estas pequeñas
diferencias se muestran como fluctuaciones estadísticas de rango pequeño que
no afectan en la separabilidad (en este ejemplo) del patrón espacial del resto
de la imagen. Desde luego, existen criterios de tipo estadístico que nos permiten
en forma cuantitativa determinar cuándo un patrón espacial tiene fluctuaciones
de rango pequeño y cuándo no, o bien establecer cuándo un patrón espectral pertenece
o no a un patrón espacial. En forma intuitiva podemos afirmar que el patrón
espectral (62, 58, 47, 38), que se encuentra un poco arriba de la forma geométrica
mostrada en la figura 16, tiene características parecidas a los patrones espectrales
que forman dicha figura geométrica o patrón espacial. De tal manera, puede decirse
que este último patrón espacial pertenece también a la figura geométrica, con
lo que es evidente que un patrón espacial puede ser tan complejo como se quiera,
además de que nos demuestra que los pixels de un patrón espacial determinado
pueden estar en diversas partes de la imagen digital, sin ser necesario que
sean vecinos próximos. Más aún, un patrón de este tipo puede estar formado por
un conjunto de pixels vecinos entre sí y cubriendo una área determinada como
sucede en el caso de la zona boscosa y el lago de la figura 22, o mostrarse
como una sucesión de pixels formando una red de líneas, algunas confluyentes
y otras no, como en el caso de la red de drenaje de la misma figura. Un patrón
espacial se forma, cuando se tiene un conjunto de patrones espectrales con características
semejantes a través de una imagen digital multiespectral. Por tanto en una misma
imagen pueden ocurrir varios patrones espaciales con semejanza; así, por ejemplo,
podría haber varios lagos o varias zonas boscosas de diferentes especies de
árboles, de tal forma que cada lago o cada zona boscosa formen de por sí un
patrón espacial o estructura quasielemental. Con esto que hemos discutido podemos
introducir ahora un nuevo concepto: al conjunto de patrones espaciales o de
estructuras quasielementales con patrones espectrales parecidos se le denomina
clase de cobertura. Esta definición es adecuada para cuando el patrón
espacial presenta condiciones de homogoneidad, cuando los patrones espectrales
que forman la clase de cobertura tiene características parecidas. Por ejemplo,
si los lagos contienen todos ellos la misma calidad de agua o si los bosques
tienen la misma especie de árboles formarán una clase de cobertura; si no fuera
así, habría tantas clases de cobertura como tipos de agua hubiera o especies
de árboles se presentarán. Sin embargo, hay casos notables donde no se tienen
condiciones de homogeneidad; este es el caso, de una radiografía en donde los
huesos o algún otro tejido no presentan en general una clase de cobertura pareja,
sino que más bien se muestran con variaciones de tono. ¿Cómo es entonces que
un ser humano distingue a pesar de ello los diferentes huesos y los asocia con
una misma clase de cobertura? Pues bien, esto se debe a que el cerebro humano
no sólo está entrenado para distinguir variaciones de tono y de color, sino
también otras cualidades con base en el contexto en el que se encuentra él o
los objetos que le interesan. Esto significa que los huesos pueden ser distinguidos
por su tono, por su forma, por su textura, por el área que ocupan y por la frontera
definida que presentan con respecto al resto de los tejidos. En otras palabras,
los huesos son percibidos con base en las características espectrales del patrón
espacial que forman, por la textura que presentan y por su morfología. En este
ejemplo queda claro que las variaciones espectrales y las espaciales están interrelacionadas
estrechamente y que es adecuado entender a una imagen como el conjunto de patrones
espaciales y espectrales, aunado a la interrelación que guardan entre ellos.
Ahora ya puede ser ampliada nuestra definición de clase de cobertura para incluir
casos generales como el de los huesos de una radiografía. Diremos entonces que
una clase de cobertura es la manifestación espacial de patrones espectrales
con variaciones continuas de valor en un contexto de textura y de morfología
parecidas.

Figura 23. Región del semiárido mexicano, al norte de San Luis Potosí, captada
por el satélite Landsat 2.
La figura 23 es una impresión fotográfica de un plano de color o banda de una imagen digital multiespectral registrada por el sensor satelitario Landsat, en donde, para esta representación visual, se utilizan 128 niveles de gris, correspondiendo al negro el valor cero y al blanco el valor 127. Dicha imagen, tomada desde un altura de poco más de 900 km sobre la superficie terrestre, muestra una zona que se encuentra al norte de la ciudad de San Luis Potosí y cubre parte de una región del semiárido mexicano. La imagen se muestra como aparentemente continua, pero el tamaño físico asociado a cada pixel, en esta representación visual, es tan pequeño que no puede distinguirse en esta impresión fotográfica. Esta figura es un buen ejemplo para poner en práctica los conceptos desarrollados hasta ahora, además de que nos permitirá aplicar claramente los elementos de análisis para entender la estructura de esta imagen de acuerdo a un fin específico.
Aun en este ejemplo sencillo donde sólo se considera un plano de una imagen
multiespectral compuesto originalmente por cuatro bandas, podemos distinguir
diversos patrones espectrales que se presentan bajo diferentes tonalidades de
gris. En el cuadrante inferior derecho pueden observarse varias estructuras
de aspecto circular que presentan un tono muy oscuro, casi negro; estas estructuras
forman un único patrón espectral y constituyen en conjunto una clase de cobertura.
A partir de aproximadamente el centro de la imagen y yendo hacia el cuadrante
superior izquierdo se puede apreciar otra clase de cobertura con un tono menos
oscuro, el cual, a diferencia de la anterior, se encuentra más o menos conectada
desde el punto de vista espacial. A su vez, esparcidos a través de la imagen,
en diversas tonalidades de gris, aparecen varios patrones espectrales que forman
clases de cobertura no conectadas espacialmente; dichas tonalidades representan
varias coberturas vegetales con diferentes densidades en cuanto al área proporcional
de la escena que ocupan. En el otro extremo, en tonos de gris muy claros casi
blancos, e encuentran un par de regiones de aspecto circular: una casi en el
centro de la imagen y la otra en el cuadrante superior derecho; estas dos regiones,
que representan lechos de lagos secos, además de un conjunto de líneas que indican
caminos y cauces secos de ríos, forman otra clase de cobertura que tampoco está
conectada espacialmente. En este sencillo ejemplo de clasificación espectral
podemos observar varias cosas: en primer lugar es claro que en esta última
clase de cobertura están incluido tres tipos diferentes de objetos: los lechos,
los cauces y los caminos, lo que nos enseña que una clase espectral (clase de
cobertura) no necesariamente está relacionada unívocamente con un solo objeto
de la escena, sino que en general lo estará con varios de ellos. Otro aspecto
interesante es el de las clases que, teniendo diferentes tonalidades de gris,
representan en forma aproximada varias densidades de vegetación. En este caso,
la clase espectral no está constituida por objetos de diferente forma, como
en el caso anterior, sino por la suma proporcional de dos clases de ellos: la
de la vegetación y la del suelo, y que diferentes densidades implican más bien
una variación en la proporción de estos objetos desde el punto de vista del
área que ocupan en cada CIV de la escena. Al agregar más bandas,
hasta considerar todas las que componen una imagen multiespectral satelitaria
(cuatro en el ejemplo de la Figura 23), es posible que las clases de cobertura
se separen o fraccionen; de esta manera es probable que los lechos de los lagos
se diferencien de los cauces de los ríos, pero también que éstos se sigan confundiendo
con los caminos. Esto se debe a que de banda a banda un mismo objeto presenta
diferentes tonalidades de gris, y que si en una banda se confunde con otros
objetos, en otra tal vez pueda diferenciarse, de tal manera que al considerar
la imagen multiespectral en su conjunto se pueden distinguir una mayor variedad
de objetos que si únicamente se considera una banda por separado. Aun así, casi
nunca puede decirse que una clase de cobertura corresponde nada más a un solo
objeto, puesto que recordemos (Figura 11) que el sensor remoto mide la energía
luminosa que proviene de un CIV, el cual, para el caso de una imagen
satelitaria moderna, puede tener 30 x 30 m2, además de que, como
puede verse, lo más probable es que en él haya varios objetos. Así pues, en
un CIV puede haber algunos árboles, suelo y rocas; todos estos
objetos contribuyen, en forma proporcional, al área que ocupan dentro del CIV
y a la energía luminosa que, finalmente, mide el sensor remoto. Nada más en
ejemplos como el de los lechos o de los lagos o en el caso de cuerpos de agua
donde el área que cubren es mucho mayor que el tamaño del CIV puede
asegurarse que la clase de cobertura contiene un solo objeto de la escena, y
esto, claro está, en el supuesto de que un lecho o un cuerpo de agua no se confunde
con algún otro objeto que tenga características espectrales similares. En este
caso diremos entonces que una clase de cobertura se equipara con una clase espectral
individual; en general consideraremos que una clase de cobertura está compuesta
por varios objetos de la escena o por varias clases espectrales. Algo más compleja
es la situación que se presenta en la formación de una radiografía, ya que los
rayos X pasan a través del tejido óseo y del tejido blando; en este caso la
energía que mide el sensor sobre el CIV correspondiente no es ya
la superposición proporcional de las respuestas espectrales de los objetos que
se encuentran en él, puesto que aquí ambos tejidos lo cubren enteramente; esto
se debe a que los rayos X los atraviesan y no son reflejados como en él caso
de una escena terrestre iluminada por luz visible. Por tanto, en una radiografía
la superposición de respuesta espectrales de los objetos contenidos en un CIV
ya no es lineal, depende más bien de la manera como interaccionan los rayos
X, primero con el tejido blando, después con el óseo y al final nuevamente con
el tejido blando. En otras palabras, estos rayos X al llegar al tejido óseo
llevan ya información del tejido blando, puesto que ya interaccionaron con ésta,
y posteriormente llevan información del tejido blando y del óseo; los rayos
X interaccionan con el tejido blando que está de un lado del tejido óseo, después
interaccionan con éste y finalmente con el tejido blando que se encuentra del
otro lado del tejido óseo. Sumémosle a estos hechos el que ambos tejidos tienen
espesores variables y que se encuentran a diferentes distancias de la fuente
de rayos X y tendremos una situación compleja, difícil de analizar, en forma
automatizada. Todo esto hace que en ningún caso de radiografía se plantee que
una clase de cobertura corresponde únicamente a un sólo objeto o clase espectral.
Hemos estudiado hasta ahora los datos que están relacionados con los patrones espectrales de la figura. 23 y hemos dilucidado algunos aspectos interesantes de la escena, pues el análisis, clasificación y segmentación de dichos patrones nos han permitido entender varias características importantes de los objetos de la escena y de su comportamiento a partir de cómo son vistos por un sensor remoto a través de cada CIV. La naturaleza cuantitativa de la imagen digital correspondiente a la escena de interés es la que hace posible dicha clasificación espectral, la que conduce, a su vez, a la separación o segmentación de varias clases de cobertura. Esta segmentación es la que da lugar finalmente a que puedan ser extraídas varias propiedades de la clase de cobertura, tales como extensión o área cubierta, localizada en la escena y frontera con otras clases; estos datos, junto con medidas puntuales hechas directamente en la escena, son los que dan información sobre la situación o aspecto que presentan los diferentes objetos del paisaje, como ya se discutió en algunos ejemplos anteriores expuestos. La clasificación espectral deja pendientes, sin embargo, algunas ambigüedades que sólo pueden ser resueltas cuando se toman en cuenta las propiedades de los patrones espaciales, esto es cuando se integran al análisis espectral las consideraciones pertinentes en cuanto a textura y morfología de tales patrones.
En cuanto a la morfología existe una clara diferencia que presenta un camino con respecto a la forma de los cauces de los ríos y a la forma de los lechos de los lagos secos y que es lo que permite segmentar en tres clases diferentes lo que antes era una clase obtenida por consideraciones puramente espectrales. Al agregar consideraciones de forma lo que estamos haciendo es poner en más planos (Figura 22) estructuras cada vez más elementales, tan elementales como queramos o como nos lo permita nuestra capacidad de análisis automatizado, ya que en algunas ocasiones no se requiere de una síntesis de la imagen (Figura 22) con un detalle demasiado elevado, y en otras la dificultad de tipo computacional es tan grande que hace imposible la separación de la imagen en una cantidad mayor de un número dado de planos o estructuras quasielementales. Tal vez se podría decir que en el otro extremo de nuestro análisis sobre la morfología se encuentra la consideración de que la forma de los lechos de los lagos se confunde con la forma de los patrones oscuros que se encuentran en el cuadrante inferior derecho, y que con esto se produce, aparentemente, un retroceso en el proceso de segmentación que deseamos realizar sobre la imagen digital original. En apariencia, la consideración de la forma nos hace retroceder en la síntesis deseada, pero aquí sucede algo similar a lo que pasó cuando consideramos los aspectos espectrales de la imagen: el considerar un solo tipo de clasificación conduce necesariamente a ambigüedades. El uso combinado de la clasificación espectral y de la clasificación morfológica debe entenderse en el sentido de la utilización de ambas clasificaciones o de una de ellas; en todo caso la que proporcione la mejor segmentación. La separación de los lechos, cauces y caminos es un ejemplo de la aplicación de la clasificación espectral seguida de la clasificación morfológica, pero, en el caso de los lechos y de los patrones oscuros mencionados, la decisión está sobre una de las clasificaciones: la espectral. Cuando el uso combinado de estos criterios de clasificación, en el sentido arriba expuesto, no permite segmentar más la imagen, es decir, no permite definir estructuras más elementales, decimos entonces que hemos agotado nuestra capacidad de análisis lógico. Aquí hay que hacer una distinción clara entre este tipo de capacidad y la capacidad de análisis computacional, puesto que puede suceder, y de hecho sucede en algunos casos, que la estructura de cierto patrón espacial esté poco clara o poco definida, de tal manera que la clasificación de su forma por medios automatizados arroje resultados ambiguos, aun cuando, tal vez, por medio de la interpretación humana directa es posible la clasificación correspondiente. En general, la limitante en la capacidad de análisis, pero no por ello en la rapidez, se encuentra, quizás dada por problemas en la implantación computacional de los esquemas lógicos de análisis, o quizás, en que no se ha logrado todavía imitar con la adecuada eficiencia los criterios cerebrales de interpretación humana.
La clasificación con base en consideraciones de textura añade elementos interesantes al análisis de la imagen digital mostrada en la figura 23. De nueva cuenta, aquellas regiones oscuras se confunden con las que presentan el tono más claro, puesto que la textura para ambos extremos de tono se presenta en un aspecto similar, haciendo notar que aledañas a las zonas más claras se encuentran manifestaciones texturales de aspecto muy peculiar que denotan un relieve del terreno diferente al de los lechos de los ríos en donde la superficie es bastante plana, y esta diferencia se presenta aun cuando el tipo de suelo sea aparentemente el mismo. Este hecho nos enseña que en lo que a la superficie de la Tierra se refiere, la textura es un indicador de la topografía del terreno, y la topografía a su vez tiene que ver con propiedades geofísicas de la misma superficie, propiedades que se refieren básicamente a la dureza del suelo y a las fuerzas que modelan el relieve de tal superficie. En el caso de una radiografía, la textura que presenta una determinada región del sistema óseo puede dar información acerca del estado de desarrollo de los huesos, o del estado de salud en el que se encuentren. Tanto la superficie de la Tierra como un tejido humano determinado presentan una variedad de texturas relacionadas con propiedades geofísicas y biomédicas relativamente bien conocidas, de tal manera que la clasificación textural es un elemento de información más en el estudio de un sistema físico por medio de percepción remota. Los cauces de los ríos y los caminos se ven como líneas quebradas y rectas respectivamente y éstas son tan delgadas que cabe preguntarse si se puede asociar una textura a un patrón espacial con estas características. Habíamos dicho que la textura estaba determinada por tres aspectos en una imagen: la frecuencia de cambio de tono, la dirección del cambio y el contraste de un pixel con sus vecinos próximos; de ahí que una línea, ya sea recta o quebrada, sea considerada como un caso particular y especial de un conjunto de texturas. Tal vez tengamos la tendencia a pensar que una clase de textura requiere, para ser considerada como tal, de un patrón que presente un aspecto repetitivo de una u otra manera y, sin embargo, en el caso de una sola línea no se tiene tal repetición, aunque de todas maneras satisface los tres aspectos determinados para que exista una clase de textura; es debido a estas consideraciones que decimos que una línea es un caso particular y especial del concepto de textura. Con base en estos mismos criterios aplicados al caso de una línea, puede decirse que en el resto de la imagen (Figura 23) se tienen tres o cuatro texturas más relacionadas con la densidad de la vegetación; pues aunque el aspecto "granuloso" es semejante para toda la cobertura vegetal, no así el contraste que varía de una densidad a otra. Los criterios completamente diferentes para establecer una clasificación espectral y una clasificación textural hacen que al menos en el caso de la cobertura vegetal de la figura 23, la segmentación que producen sea más bien complementaria y no excluyente.
¿Qué podríamos decir ahora, en forma comparativa, de las tres clasificaciones
posibles: espectral, textural y morfológica, que pueda ser aplicable en el proceso
de análisis de una imagen digital multiespectral? Para responder a esto consideremos
la Tabla 2 donde se muestran varios elementos de información física acerca del
terreno, y que aporta cada clasificación para el caso de una imagen satelitaria
de la superficie terrestre.
Tabla 2. Matriz comparativa del tipo de clasificación en una imagen digital vs atributos del terreno.
| |
||||||
| Elemento de información | |
|
|
|
|
|
| Clasificación | Topografía |
Reflectancia |
Actividades del hombre |
Cobertura vegetal |
Conjunción suelo/vegetal |
Red de drenaje |
| Textural | X |
|
X |
X |
X |
X |
| Espectral | |
X |
X |
X |
X |
X |
| Morfológica | |
|
X |
|
|
X |
| |
||||||
El atributo cobertura vegetal se considera aquí para cuando se tienen densidades de vegetación muy altas, lo suficiente para que cubra enteramente el suelo, y, por conjunción suelo/vegetación se entiende el aspecto físico que presenta un cierto tipo de vegetación desarrollada sobre un cierto tipo de suelo para una variedad amplia de densidades de vegetación, pero sin que ésta cubra totalmente al suelo. Las condiciones topográficas y del tipo del suelo determinan no nada más la especie o especies vegetales presentes, sino también el aspecto que presentan en cuanto a la textura, además de que la respuesta espectral será la combinación ponderada de las respuestas individuales de la vegetación y del suelo, como ya se había mencionado. En el caso de que un atributo sea cubierto por más de una clasificación, debe entenderse que es en el sentido complementario a como se discutió más arriba. Debe quedar claro que cada clase de imagen tiene un conjunto de atributos predeterminados por el contexto bajo el cual se adquirió la información de la escena correspondiente y que, una vez definido dicho conjunto, la matriz comparativa, análogamente a la de la Tabla 2, se construye con base en las características particulares del problema que se desea analizar a través de la imagen digital respectiva. El manejo de una tabla de clasificación como la Tabla 2 constituye un recurso general y amplio de una metodología adecuada para el análisis de una escena dada, ya que es a través de estas tres posibles clasificaciones que se realiza la segmentación de la imagen digital correspondiente a la escena y son las estructuras quasielementales las que dan información cuantitativa de cada clase de objetos en la escena. Si una o varias estructuras de este tipo cambian en la imagen digital, también lo hace la clase o las clases de objetos correspondientes en la escena. La manera particular como se presentan las estructuras quasielementales de una imagen define claramente la situación en la que se encuentran los objetos de la escena en el contexto de un problema dado, es decir que las estructuras correspondientes, digamos al sistema óseo, se presentan de una manera característica y única dependiendo de la situación general de salud en la que se encuentre dicho sistema. En este contexto podemos decir que la manera particular en la que se presentan las estructuras quasielementales de una imagen digital multiespectral definen lo que llamaremos estado espacial de la imagen, y que el camino de cualquiera de dichas estructuras da como resultado un cambio en el estado espacial de la imagen, lo que se traduce en que un cambio en el estado espacial implica que en la escena ha ocurrido una modificación y que por tanto el análisis correspondiente arrojará resultados diferentes. Todo esto dejando claro que, como la imagen ha sido sintetizada en estructuras quasielementales, se puede definir y cuantificar exactamente de qué tipo y de qué extensión ha sido la modificación que ha experimentado la escena.
Veamos ahora cómo se pueden resumir esquemáticamente los conceptos desarrollados
aquí para el análisis de una escena; para ello consideremos la Tabla 3.
Tabla 3. Orden lógico para el análisis de una imagen digital
y para la evaluación integral de la escena correspondiente.
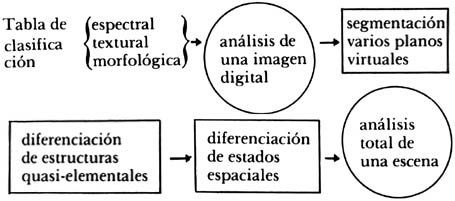
En la Tabla 3 se han marcado con sendos óvalos el análisis de una imagen digital y, por tanto, el de la escena correspondiente, puesto que el análisis de la primera implica el de la segunda. La clasificación en tres posibles contextos: espectral, textural y morfológica es el comienzo del proceso, pues la tabla de clasificación correspondiente se construye a partir de la imagen dada y de los atributos del problema; la solución correspondiente se encuentra por medio de la segmentación de la imagen digital en estructuras quasielementales hasta llegar a la evaluación de la situación de la escena a través de la diferenciación del estado espacial correspondiente a dicha situación. No debemos olvidar, desde luego, que el análisis de la escena requiere de la observación directa de un número selecto de objetos que se encuentren en la misma.
Se han vertido hasta aquí una serie de conceptos muy importantes para comprender
lo que es la percepción remota, la cual involucra en forma integral la captura
de la imagen de una escena que se encuentre bajo condiciones relativamente bien
conocidas, el manejo de la más moderna tecnología para el diseño y construcción
de los sensores remotos adecuados a cada problema y, desde luego, el análisis
de las imágenes digitales por medios automatizados utilizando una computadora
digital. Dichos conceptos nos permiten retomar la definición de la percepción
remota y replantearla en términos más amplios y generales; para esto diremos
que la percepción remota espacial y aerotransportada está diseñada para obtener
datos, en un experimento controlado, acerca de una escena, la que puede estar
constituida por una superficie física o virtual. Las medidas involucradas a
distancia no son encontradas para establecer nuevas leyes físicas, sino más
bien para identificar, discriminar y caracterizar (matemática y físicamente)
las clases de objetos que yacen sobre dicha superficie. Las observaciones hechas
de esta manera se refieren básicamente a las propiedades espectrales y espaciales
(texturales y morfológicas) de los mencionados objetos. Es posible que varias
de las observaciones sean repetitivas, con lo que se pueden considerar también
las propiedades temporales de la escena en el conjunto de medidas. La interacción
de la superficie sensada con los mecanismos de "iluminación" está en buenos
términos bien entendida. La interacción puede ser complicada para sistemas activos,
como el radar, las señales acústicas, los rayos X o los haces corpusculares,
o simples para sistemas pasivos, como es el caso de la teleobservación de la
escena terrestre cuando se encuentra iluminada por la radiación solar. En cualquier
caso, el mecanismo de generación de imágenes depende, primeramente, de la interacción
arriba mencionada, segundo, de la geometría particular (Figuras 1 y 2) de iluminación;
fuente-objeto de la escena/sensor remoto, y tercero, del método de observación
y del dispositivo sensor. Las propiedades espaciales y espectrales de la escena
están quasipermanentemente registradas en forma digital o analógica y la imagen
resultante contiene mucha información relacionada con los tres factores mencionados.
El proceso de formación de imágenes arriba descrito es aplicable tanto en percepción
remota, como en la física nuclear, las ciencias biomédicas y en la industria,
pues, como se ha visto a lo largo de este trabajo, todas estas ramas de la ciencia
y la tecnología utilizan las técnicas y la metodología de la percepción remota
en el desarrollo experimental de la investigación básica y aplicada. Por razones
históricas, la percepción remota es actualmente un término reservado para cuando
se estudia el medio ambiente geofísico y para cuando las observaciones mencionadas
se hacen desde el espacio y desde el aire.
Figura 24. La porción inferior de esta figura muestra la banda 5 (rojo)
de una imagen satelitaria que ha sido degradada por la interferencia de la luz
solar por la atmósfera. En la parte superior se muestra la misma pero
restaurada después de haber modelado físicamente dicha interacción.
Es necesario insistir que la percepción remota es una ciencia aparte con métodos
y elementos propios que han sido aplicados exitosamente en otras ramas de la
investigación experimental. Cabe añadir también que cuando esto se ha hecho
así se habla en términos generales de teleobservación: de la generación de imágenes
digitales multiespectrales acerca de una escena cualquiera. El proceso de extracción
de información (análisis de imágenes) está conectado a los tres factores mencionados
con anterioridad y a los mecanismos de degradación (Figura 24) involucrados
en la formación de la imagen. El estudio y comprensión de esto facilita el camino
hacia la evaluación de las clases de objetos de la escena, de acuerdo a la representación
esquemática de la figura 25:
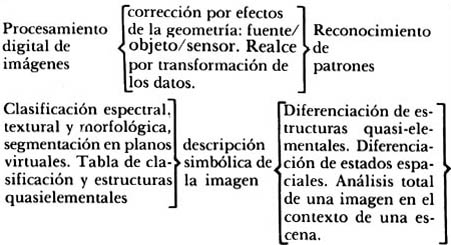
Figura 25. Etapas en el análisis de una imagen digital para la
evaluación y modelado de las clases de objetos de la escena.
Una vez que se obtiene la descripción simbólica de una imagen o de su estado espacial, la relación de una cierta cobertura de clase de objetos con un recurso particular puede no ser directa ni fácil de encontrar en la mayoría de los casos. Esto implica el modelaje del medio ambiente geofísico relacionado a tal recurso natural. Cuando este modelaje se complementa adecuadamente con observaciones directas (apoyo de campo) acerca de las clases de objetos, entonces se puede obtener información valiosa acerca de la superficie sensada. Es en esta etapa en donde se puede realizar una planeación adecuada de los recursos naturales por medio de un Sistema Geográfico de Información, con consecuencias muy importantes en el desarrollo socioeconómico de un país.
En forma global podemos decir también que la percepción remota se compone de
cinco elementos básicos: el paisaje, la escena, el sensor remoto, el tratamiento
de la información relativa a la escena y la modelación (cuantificación física
y matemática) de las clases de objetos relativos a aquélla con fines de conocimiento
del paisaje. Todos estos elementos han sido ya discutidos, sin embargo es conveniente
retomar algunos y considerarlos en otro contexto con el objeto de complementar
y ahondar lo dicho hasta ahora. En lo que se refiere al sensor remoto podemos
considerarlo como un dispositivo capaz de caracterizar adecuadamente la escena,
y la lista de instrumentos (Tabla 1) que pueden clasificarse como tales es muy
grande y variada: cubre desde la cámara fotográfica hasta el explorador espacial
más refinado. Pero lo más importante es que para caracterizar adecuadamente
una escena es necesario que el sensor pueda medir un conjunto de variables físicas
que aquélla contiene. Por supuesto no es indispensable ni práctico que éste
mida todas las variables, pues una escena es comúnmente muy compleja y contiene
una gran cantidad de ellas. Una caracterización adecuada será entonces aquélla
que sea capaz de medir un número selecto de variables que son de interés para
el investigador, y cuyo papel es seleccionar y aislar la información necesaria
y suficiente para entender el fenómeno que le interesa, a fin de comprender
el comportamiento del paisaje en un problema específico. Pero como un sensor
remoto guarda su distancia respecto a la escena, las variables medibles por
él se reducen a dos: la intensidad y la energía de luz o radiación emitida o
reflejada por los objetos que se hallan en ella; la intensidad corresponderá
a la brillantez y la energía al color (esto para el caso de la luz visible).
Así, la percepción remota se reduce a medir la variación espectral, espacial
y temporal de la radiación que proviene de la escena. La intensidad de esta
radiación, para cada energía, depende, en forma compleja, de los componentes
de aquélla y de la intensidad de la radiación que emite la fuente de iluminación.
En algunos casos es posible que la escena absorba parte de la radiación incidente
y después de un cierto tiempo la reemita en una forma de energía diferente.
Los sensores más sensibles (espectroradiómetros) permiten estudiar este fenómeno
de absorción y reemisión. En general, para un CIV determinado de
la escena y en un instante dado, se puede medir la intensidad de la radiación
que corresponde a cada valor de la energía, es decir a cada color de la luz
incidente, obteniendo así lo que se conoce como respuesta espectral de ese CIV.La
finalidad del uso del sensor remoto consiste en medir esta respuesta para cada
punto de la escena. A este conjunto de medidas se le llama imagen multiespectral
digital de la escena. Dicho en otras palabras, el sensor, mediante un sistema
optoelectrónico, divide la región del espectro de colores de la luz que proviene
de ellas en varios intervalos llamados bandas y a cada uno le asigna un valor
proporcional a la intensidad de la radiación que proviene de cada CIV
de la escena. Este valor de intensidad se aproxima, a su vez, mediante un convertidor
que traduce la señal analógica (continua) a un valor numérico digital. Estos
valores pueden ser por su parte almacenados en algún dispositivo conveniente,
como una cinta magnética, o en el caso de un sensor satelitario, ser transmitidos
a la estación de rastreo del satélite más próximo. El desglosar el espectro
de luz en varias bandas o planos de color facilita la obtención de información
a partir de los datos de la escena, ya que el grado de luminosidad de cada uno
de los elementos que la componen varía de banda a banda, como ya se había explicado.
Este método forma en un proceso en paralelo, varias imágenes de la misma escena,
produciendo lo que se conoce como imagen multiespectral de la misma.
Para fines de representación visual (despliegue) de la imagen digital multiespectral, en cada una de las bandas, puede asignarse a sus elementos o pixels un color arbitrario, lo que ayuda, entre otras cosas, a la clasificación y realce de dichos elementos. La superposición de estas imágenes en un sistema de despliegue (Figuras 6, 18, 19, 20, 23 y 24) constituye una reconstrucción de la escena y la información contenida en tales bandas, separable o interrelacionada, permite el análisis (visual) y modelado (físico y matemático) de los objetos que la componen. Los datos de cada banda de la imagen multiespectral, con sus respectivas correlaciones acerca de todos los elementos de una escena, son numerosísimos, por lo que es necesario utilizar una computadora digital para que los procese. Un sistema de computación con una programación adecuada puede examinar y clasificar rápida y sistemáticamente los datos obtenidos por el sensor remoto. La potencialidad de un sistema de este tipo estriba en su capacidad para manejar la información cuantitativa relativa a la escena. Antes de evaluar las imágenes de ésta es necesario procesar los datos obtenidos por el sensor y prepararlos a fin de que puedan ser analizados. Esto se realiza en tres etapas: primera, la corrección de defectos debido a la distorsión de la geometría particular que guarda la plataforma y el sensor con la escena y la fuente de iluminación; segunda, el realce por transformación de los datos de la imagen con el objeto de poner en evidencia ciertos patrones en la imagen, y tercera la agregación o clasificación de los datos relativos a la escena. Una vez así procesadas, las imágenes se encuentran listas para el trabajo de evaluación y modelado, el que se realiza precisamente en la parte que se ha denominado descripción simbólica de la imagen digital (Figura 25) y que culmina con la construcción de una tabla similar a la 2. El tratamiento de los datos relativos a la escena en el contexto de lo que se esquematiza en la figura 25 se realiza por medio de un paquete de programas formado por una variedad de algoritmos computacionales instalados en una computadora digital. Dicho paquete puede operar con los valores provenientes de cada banda que hayan sido adscritos a las repuestas espectrales de cada CIV de la escena. Mediante el examen automático de estos valores, las áreas sobre ella que muestren respuestas similares pueden ser relacionadas, clasificadas y modeladas en el contexto del medio ambiente geofísico, físico, biomédico e industrial.
En principio, el comportamiento temporal de la respuesta espectral de los puntos
de la escena, permitirían identificar los elementos que la componen, con la
sola limitación de la resolución espectral y espacial del sensor remoto. Sería
una tarea formidable medir directamente la gran variedad de objetos, con sus
respectivas variaciones estadísticas, que forman los diferentes sistemas físicos
susceptibles de estudio por medio de la percepción remota y posteriormente almacenar
en un banco de datos el resultado de estas medidas con el objeto de utilizarlos
en el análisis de los sistemas físicos mencionados. Así, es necesario establecer
un compromiso entre la teleobservación de la escena y las medidas directas efectuadas
sobre ella misma. Las medidas directas son indispensables en la correcta identificación
de los objetos teleobservados. Las medidas directas o medidas puntuales son
un conjunto de datos, tomados directamente sobre la superficie que forma la
escena y que permiten establecer una correlación unívoca entre los datos que
produce el sensor y la realidad física de la misma. Es claro que si se contara
con "toda" la información directa de la escena, la percepción remota sería inútil
por redundante, y que si las medidas puntuales fuesen desconocidas, los datos
obtenidos por el sensor remoto no tendrían todo el potencial y la utilidad que
tienen cuando se combinan con dichas medidas puntuales. Más aún, con la carencia
de este tipo de medidas, algunos datos del sensor remoto faltarían de sentido
por no saber exactamente a qué corresponden. Las medidas puntuales sirven de
calibración al experimento realizado por medio de la percepción remota. Un factor
muy importante en la percepción remota en geofísica es la atenuación de la luz
proveniente de la Tierra debido a la atmósfera y a las nubes. Aunque esta atenuación
se debe principalmente a la dispersión de la luz por las moléculas que forman
el aire, hay algunas regiones del espectro de luz donde se produce por absorción,
fundamentalmente debida a moléculas de agua, ozono, oxígeno y bióxido de carbono.
A esto hay que agregar que en el caso de las nubes la luz que proviene del Sol
es reflejada hacia el espacio y no alcanza por tanto a iluminar la superficie
terrestre. Estos problemas implican que las regiones del espectro de luz donde
no hay absorción forman varias "ventanas" que se aprovechan para denominar las
bandas más convenientes en operación del sensor remoto (Tabla 4). Así, por ejemplo,
en los Landsat 4 y 5 la banda número 4 se ha reducido con respecto a la que
utilizaban los Landsat 1 y 2 para evitar la absorción debida a las moléculas
del agua en semisuspensión en la atmósfera terrestre. El problema que presentan
las nubes es más complicado, ya que además de la atenuación por dispersión y
absorción, la luz reflejada por ellas se superpone a la que proviene directamente
de la tierra y que incide en el sensor remoto. Este efecto es muy importante,
ya que en cualquier momento la Tierra se encuentra cubierta por nubes en un
50% de su superficie. Cuando la nube es delgada, y permite al menos un 50% de
transmisión de la luz, es posible recobrar (Figuras 26(a) y 26(b), véase pliego
a color) parte de la información que se encuentra debajo de ella. En los Landsat
3, 4 y 5, una banda en el infrarrojo térmico ayudará, en parte, a resolver esta
dificultad puesto que las nubes y la atmósfera son más transparentes en esta
región del espectro de luz invisible al ojo humano, que en aquella región de
la luz visible.
Tabla 4. Comparación de algunos datos de plataformas espaciales
y sus respectivos sensores.
| |
|||||||
| Plataforma Dato | Skylab | Landsat 1 y 2 | Landsat 3 | Landsat 4 y 5 | SPOT | Nimbus 7 | GOES 6 |
| |
|||||||
| Fecha de lanzamiento |
Febrero, 1973 | Julio,1972 y Enero 1975 | Marzo, 1975 | Julio, 1982 y Marzo, 1984 |
Noviembre 1985 | Octubre, 1978 | Abril, 1983 |
| |
|||||||
| Altura sobre la tierra |
435 km | 920 km ambos | 912 km | 700 km ambos | 822 km | 955 km | 36000 km |
| |
|||||||
| Periódo de la órbita |
93 minutos | 103 minutos ambos |
103 minutos | 99 minutos ambos |
101 minutos | 107 minutos | 24 horas |
| |
|||||||
| Tamaño del elemento de resolución |
variable y comparable a los Landsat 1 y 2 | 57x79 m² | 57x79 m² 238x238 m² para la 5a. banda. |
30x30 m² 120x120 m² para la 6a. banda |
20x20 m² 10x10 m² para la 4a. banda. |
800x800 m² | 14x14 km² para la 1a. banda,8x8 km² para la 2a. banda |
| |
|||||||
| Tamaño de la imagen |
variable | 185x185 km² | 185x185 km² | 185x185 km² | 60x60 km² | 16000 x 16000 km² |
18000 x 20000 km² |
| |
|||||||
| Bandas espectrales | 13 bandas espectrales entre 0.4 y 12.5 mm | 1)0.5-0.6mm 2)0.6-0.7 3)0.7-0.8 4)0.8-1.1 |
1)0.5-0.6mm 2)0.6-0.7 3)0.7-0.8 4)0.8-1.1 5)10.4-12.6 |
1)0.45-0.52mm 2)0.52-0.60 3)0.63-0.69 4)0.76-0.90 5)1.55-1.75 6)10.4-12.5 7) 2.08-2.35 |
1)0.50-0.59mm 2)0.61-0.69 3)0.79-0.90 4)0.51-0.73 |
1)0.43-0.45mm 2)0.48-0.50 3)0.51-0.53 4)0.55-0.57 5)0.58-0.60 6)0.66-0.68 7)0.75-0.79 8)0.84-0.89 |
1)0.55-0.75mm 2)10.5-12.5 |
| |
|||||||
Nota: la correspondencia aproximada "colores" y longitudes de
onda es la siguiente:
| Violeta | 0.40-0.45 mm | Amarillo | 0.56-0.59 mm | Infrarrojo cercano | 0.70-3.0 |
| Azul | 0.45-0.51 | Anaranjado | 0.59-0.63 | Infrarrojo térmico | 3.0-14.0 |
| Verde | 0.51-0.56 | Rojo | 0.63-0.70 |
Hemos desarrollado y estudiado hasta ahora los elementos más importantes para el análisis de una imagen multiespectral con el objeto de entender los mecanismos del funcionamiento de la escena y del paisaje. Cabe aclarar que las dificultades matemáticas y computacionales para el análisis digital de una imagen multiespectral pueden ser enormes. De hecho en algunos casos los requerimientos en computación y matemáticas son de una importancia tal que implican que un laboratorio de percepción remota necesite de personal altamente calificado y requiera de los más avanzados sistemas computacionales. Por otro lado diremos también que de las clasificaciones mostradas en la Tabla 2, la que es relativamente más fácil de llevar a cabo es la espectral, ya que la definición de respuesta espectral es de una naturaleza que no permite ambigüedades. La definición que se dio aquí es claramente cuantitativa y conduce a establecer reglas precisas para la separación de clases espectrales que finalmente pueden ser asociadas con las de cobertura de la escena, de acuerdo a la serie de ejemplos dados con anterioridad. Las dificultades matemáticas y computacionales se incrementan a medida que se enfrentan problemas de clasificación textural o morfológica y esto se debe básicamente a que aún no se comprenden cabalmente los mecanismos que utiliza un ser humano para analizar en general una imagen. A medida que se vayan entendiendo dichos mecanismos, se irán eliminando elementos de subjetividad y se obtendrán criterios claros y cuantitativos para las clasificaciones textural y morfológica; esto traerá como consecuencia un incremento notable en la velocidad de análisis, sin dejar de lado que, en una simbiosis estrecha, entender los mecanismos cerebrales de reconocimiento de patrones también traerá un mejoramiento en el diseño de los sistemas computacionales, tanto en su arquitectura como en los lenguajes de operación de la computadora respectiva.
En la captura y registro de una imagen multiespectral de una escena dada existen siempre fenómenos o medios de interferencia (Figuras 24 y 26) que degradan de cierta manera la información contenida en la imagen digital. Éste es el caso mostrado en la figura 24, en donde se presenta una impresión fotográfica del plano de color o banda que corresponde al rojo de una imagen multiespectral satelitaria de cuatro bandas. De hecho, todas las imágenes satelitarias son degradadas por la interacción de la luz con la atmósfera, lo que consiste en que la luz se dispersa al interaccionar con las moléculas que componen el aire de aquélla, siendo mayor el grado de dispersión para el azul y disminuyendo gradualmente hacia el rojo, lo que significa que los planos de una imagen multiespectral estarán degradados de manera diferente de acuerdo al filtro de color con que fueron tomadas. Al modelar físicamente dicha interacción se logra entender y cuantificar la dispersión de la luz solar en función del color y de las componentes atmosféricas, lo que permite entonces restaurar la imagen al estado que tendría si no hubiera ocurrido dicha dispersión. La restauración consiste en construir una imagen que llamamos restaurada a partir de la imagen degradada y de la comprensión del fenómeno de degradación, de tal forma que el producto resultante sea como si el fenómeno de degradación hubiese estado ausente al momento de la captura de la escena correspondiente. En la mayoría de los casos de degradación los efectos se manifiestan como si la imagen resultante estuviese borrosa, fuera de foco o carente de contraste. Al observar la parte superior de la figura 24 vemos que estos efectos han sido minimizados. En otros casos de degradación la imagen resultante puede aparecer como "embarrada" por el movimiento relativo entre el sensor y la escena, como es el caso de un sensor orbital donde la captura de ésta debe hacerse en forma extremadamente eficiente para minimizar este efecto de "embarramiento". La figura 26 nos enseña un caso interesante de degradación, puesto que en la parte (a) se puede apreciar una imagen similar a la mostrada en la figura 24, pero con una nube cubriendo la parte inferior. Esta nube es bastante delgada, es decir deja pasar más del 50% de la luz que proviene del sol. Aun así constituye un verdadero obstáculo; el resultado es que difícilmente se aprecia lo que se encuentra debajo de dicha nube. Con un modelo matemático y físico, una buena parte de la nube ha sido "removida" (Figura 26(b)), logrando con esto una imagen restaurada. Tal restauración es sólo para casos relativamente simples, puesto que para nubes gruesas o con espesor altamente variable es prácticamente imposible recobrar la información pertinente a la imagen digital. En el caso de la radiografía de un ser humano o de un motor en donde se pretenden observar patrones internos como huesos o defectos, los mecanismos de degradación son más complejos, ya que el medio o los medios de interferencia están estrechamente ligados con los patrones que se desean estudiar. Aun en este caso la restauración es posible cuando son bien conocidas las circunstancias bajo las cuales fueron tomadas las radiografías.



