I. INTRODUCCIÓN
LA EXPLORACIÓN del planeta Tierra ha sido una de las principales inquietudes
del hombre desde la época prehistórica. Su atención se ha visto atraída por
una poderosa necesidad de saber qué se encuentra más allá de sus dominios. Al
principio exploró el medio ambiente únicamente con sus sentidos, utilizando
en primera instancia aquéllos que no requerían de un contacto físico con el
objeto estudiado (vista y oído), para posteriormente continuar con un análisis
directo por medio del tacto principalmente. En todo este proceder, el hombre
ha empleado una serie de elementos que lo identifican no nada más como una criatura
llena de interés por la investigación, sino también como un ser deseoso de dominar
la naturaleza que lo rodea.
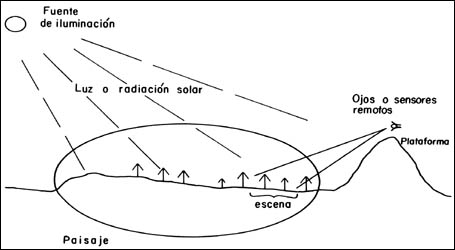
Figura 1. Representación de los elementos básicos de la percepción
remota.
Así, su curiosidad y su afán por conocer el territorio donde habita le condujeron primero a encaramarse en la copa de un árbol y posteriormente a subir a una colina o a una montaña para tener de esta manera una visión de conjunto o lo que es lo mismo, una visión sinóptica del paisaje. Aun en esta reseña esquemática de las actividades primitivas de exploración del hombre pueden distinguirse los elementos básicos (Figura 1) que hoy componen la moderna ciencia de la percepción remota: la fuente de iluminación, formada en este caso por el Sol que emite luz o radiación solar; el paisaje, configurado por todos los objetos1 presentes en el territorio explorado por el hombre, tales como ríos, colinas, vegetación o rocas; la escena, o sea aquella sección o superficie del paisaje donde enfoca su interés, pudiendo ser la superficie de una roca o un valle completo; el sensor remoto, con el que se captura la luz proveniente de la escena y que, en este caso, permite obtener una representación visual de aquella región del paisaje que ha sido enfocada por el iris y el cristalino del ojo; la plataforma, que es el lugar donde se coloca o monta el sensor remoto para obtener una visión de conjunto de la escena; el sistema de procesamiento, compuesto por el dispositivo para procesar cualitativa o cuantitativamente los datos proporcionados por el sensor remoto acerca de la escena, los cuales, analizados e interpretados en este ejemplo por el cerebro del hombre, producen información valiosa en relación al paisaje, la que es útil en la toma eventual de decisiones sobre el medio ambiente, y el apoyo de campo, que consiste en la inspección directa, en varios puntos selectos de la escena, de diferentes atributos de los objetos que se encuentran en el terreno, con el fin de evaluar los datos obtenidos previamente a distancia.
La distancia con respecto a la escena, a la cual se coloca la plataforma (Figura 2), permite tener una visión sinóptica a diferentes escalas del paisaje, lo que se logra gracias a una sucesión de observaciones que van cubriendo poco a poco la región deseada. Éstas pueden hacerse, en general, a diferentes horas del día, en diferentes épocas del año y, muy probablemente, por medio de diferentes filtros de color. En este proceso se genera una gran cantidad de datos, los que, analizados adecuadamente por medio de criterios muy bien definidos, proporcionan valiosa información acerca de los recursos naturales terrestres y sientan las bases para su estudio racional.
Con el desarrollo moderno de la ciencia de la computación electrónica digital
se ha dado un auge importante a la percepción remota, pues la disponibilidad
de estas herramientas permite la evaluación cuantitativa de un gran volumen
de datos. Así, en una simbiosis muy estrecha las ciencias de la computación
han impulsado el desarrollo de la percepción remota, y ésta, a su vez, ha generado
nuevos sistemas de procesamiento digital con propósitos específicos.
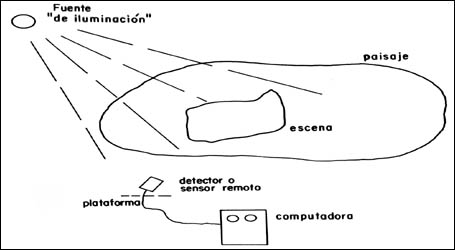
Figura 2. Diagrama esquemático de los componentes básicos de la percepción remota representados según la investigación experimental moderna.
A su vez, el desarrollo de la ciencia y la tecnología ha permitido incorporar nuevos métodos y dispositivos de captura de datos a distancia, lo que ha hecho que la percepción remota extienda su campo de acción a fenómenos muy diversos, ya no sólo en el mundo macroscópico sino también en el microscópico. Veamos ahora desde esta perspectiva cómo se identifican de nuevo sus elementos básicos.
La fuente de iluminación: hay sistemas en percepción remota que utilizan una fuente de iluminación externa, sobre la cual no se puede tener control. Estos sistemas, llamados sistemas pasivos, pueden utilizar al Sol o bien a una estrella lejana como fuente de iluminación. Es claro pues que en un experimento de percepción remota donde se utilice al Sol de ese modo, sólo se podrá hacer uso de las características regulares y conocidas de éste; es decir, que en forma pasiva habrá necesidad de "esperar" a que las condiciones de iluminación sean las adecuadas para efectuar la observación correspondiente de la escena. Si se desea cubrir todo un paisaje con observaciones sistemáticas, será necesario entonces cuidar muy bien que las características de la iluminación, es decir hora y estación del año, sean las que requiere el diseño del experimento correspondiente, lo que asegurará una tasa de éxito más que razonable. Habrá experimentos que las requieran a una misma hora en la misma estación del año, y otros a diferentes horas en las cuatro estaciones del año. De hecho, cualquier combinación es posible dependiendo de la aplicación deseada.
Por otro lado hay sistemas en percepción remota que utilizan su propia fuente de iluminación, de la que, por tanto, se tiene control. Este tipo de sistemas, llamados, por supuesto, sistemas activos, son los que han permitido extender el campo de estudio de la percepción remota a una diversidad de fenómenos donde la fuente de iluminación ya no emite luz visible para "iluminar" la escena. En estos casos la fuente (Figura 2) puede ser luz ultravioleta o infrarroja, rayos gamma o rayos X, o bien un haz de partículas como protones o neutrones. Con esta diversidad en fuentes de iluminación es por tanto posible aplicar las técnicas de la percepción remota no sólo al ámbito de la geofísica, sino también al de la medicina, la biología, la física nuclear y la industria.
El paisaje: éste es el elemento de la percepción remota que más retos da al investigador. Esto es así porque, primero, el paisaje constituye el sistema físico objeto de su estudio; segundo, porque generalmente es una parte muy compleja donde intervienen muchos factores, algunos de ellos ajenos al propósito de la investigación, y tercero, porque sucede con frecuencia que el investigador no controla una parte o, en algunos casos, todos los aspectos que componen el paisaje. El investigador puede controlar, y de hecho lo hace, el sensor remoto, la fuente de iluminación, o el procesamiento de los datos, pero puede escapar a su injerencia el sistema físico que desea analizar. Por otro lado, una gran porción de los errores que se cometen en el diseño y operación de un experimento de percepción remota provienen precisamente de la subestimación o sobresimplificación de la complejidad del paisaje.
Con los conceptos vertidos anteriormente podemos entender que este objeto global de estudio puede verse ahora como un sistema microscópico, digamos un conjunto de átomos "iluminados" por un haz de electrones, o bien como un sistema macroscópico, tal como un cultivo de bacterias "iluminadas" por medio de luz ultravioleta. De hecho, también podemos entender al "paisaje" como el cuerpo humano "iluminado" por rayos X, con el propósito de obtener de él radiografías. Una aplicación relevante de los sistemas activos en la prospección de los recursos naturales terrestres es el uso de señales de radar, ya que al interaccionar con el paisaje terrestre permiten obtener datos complementarios a los que se obtienen utilizando luz visible. En otras palabras, podemos afirmar que dichos sistemas activos amplían la capacidad para obtener imágenes con representación visual, las cuales, hace algunos años, no podían generarse por razones tecnológicas, teniendo que conformarse con el análisis de datos puramente numéricos. Esta capacidad de representación visual es la que permite a un médico el examen del sistema óseo y determinar la presencia y localización de tumores, o bien la que ayuda a un biomédico en el estudio de la morfología de una bacteria con el fin de establecer su virulencia.
La escena: es probable que ésta sea uno de los elementos básicos de
la percepción remota más difíciles de entender, pues implica el manejo de conceptos
lógicos, es decir de entidades no físicas. Imaginemos un plano o superficie
que forma parte de un paisaje, consideremos todos los objetos de éste que se
encuentren sobre aquél, y de esa manera tendremos una imagen visual de una escena
del paisaje. Esto nos lleva a que, al variar el enfoque de la lente de una cámara
fotográfica, se pueden obtener diferentes escenas de un mismo paisaje, escenas
que, por supuesto, son plasmadas en el film fotográfico una vez que se acciona
el disparador de la cámara. Así pues, sobre la fotografía resultante quedan
grabados en forma permanente y visible el conjunto de objetos que se en combinan
sobre la escena, y por tanto aquélla se convierte en una representación bidimensional
de los objetos en todos o, lo que es lo mismo, en una imagen de la escena.Esta
última consideración es de vital importancia, pues el manejo y análisis de las
imágenes correspondientes a diferentes escenas es lo que permite entender el
funcionamiento del paisaje, con las consecuentes repercusiones para el eventual
dominio del mismo. Un ejemplo claro de estos conceptos es el de una radiografía:
un médico a la hora de enfocar su aparato de rayos X sobre una sección del sistema
óseo lo que está haciendo es seleccionar una escena del "paisaje", que en este
caso es el cuerpo humano. La superficie que constituye la escena es en este
ejemplo el plano sobre el que se enfoca el aparato de rayos X y los objetos
son los huesos que se encuentran enfocados; la radiografía resultante es la
representación visual de los huesos y su estructura. Es claro que la interpretación
que hace el médico de la radiografía le permite entender qué sucede en el sistema
óseo del paciente, dilucidar posibles problemas como fisuras, fracturas, debilitamiento
o tumores en algún hueso, y, sobre todo, tomar las acciones correctivas necesarias
que le conduzcan al "dominio" del "paisaje", es decir a restablecer eventualmente
el estado de salud del paciente.
| |
||||
| Región espectral y tipo de sensor |
Intervalo de longitud de onda (/m) + |
Máxima resolución espacial (miliradianes)* |
Capacidad de penetración atmosférica
|
Capacidad de operación |
| |
||||
*Rayos gamma contadores de centelleo,
foto-multiplicadores acoplados a cris-tales como NaI y LiGe |
10-16
a 10 -5 |
< 0.01 |
utilizable sólo en medios de muy baja
densidad o a muy corta distancia de la escena. |
día y noche |
*Rayos x contadores de centelleo
y Geiger. |
10-5
a 0.004 |
< 0.01 |
igual que el caso anterior. |
día y noche |
*Ultravioleta película fotográfica
con lentes de cuarzo, fotomultiplicadores |
0.004 a 0.38 |
0.01 a 0.1 |
la atmósfera reduce sensiblemente la
penetración, se puede utilizar desde avión. |
día |
*Visible televisión, cámaras convencionales,
fotomultiplicadores, detectores de estado sólido. |
0.38 a 0.78 |
0.01 a 0.1 |
la neblina y los contaminantes reducen
la penetración, se pueden hacer observaciones desde satélite. |
día |
*Infrarrojo fotomultiplicadores,
detectores de estado sólido, película sensible al infrarrojo. |
0.78 a 101 |
0.01 a 1.0 |
influyen poco la neblina y los contaminantes,
se pueden hacer observaciones desde satélite. |
día y noche |
*Microondas radar con antenas emisoras
y barredoras. |
103 a 106 |
0.01 a 10.0 |
casi no influyen la neblina y los contaminantes,
se pueden hacer observaciones desde satélite. |
|
| |
||||
La longitud de onda es la distancia entre crestas, considerando la luz como un fenómeno ondulatorio; 1m = 1-6 m. Un radián es aproximadamente igual a 57°; y un miliradián es igual a 10-3 radianes.
El sensor remoto: el desarrollo tan importante que ha tenido la tecnología en esta área de la percepción remota ha permitido al hombre ampliar (Tabla 1) su capacidad visual. Nuevos y modernos detectores permiten ahora capturar luz invisible como la ultravioleta o la infrarroja, y detectar radiaciones como los rayos X y gamma y partículas como electrones, protones o neutrones. Ejemplos de tales detectores son la placa fotográfica, la película fotográfica infrarroja, los detectores Geiger, los fotodetectores, las fotomultiplicadores y las cámaras de televisión. Muchos de éstos son baratos y de gran eficiencia, y algunos incluso proporcionan imágenes en forma cuantitativa, es decir en forma numérica, de tal manera que la información resultante puede ser almacenada en computadora para proceder a un análisis matemático ulterior. Todos estos detectores han ampliado enormemente la capacidad de observación en percepción remota y pueden proporcionar actualmente imágenes de gran calidad de paisajes tan remotos como las lunas de Júpiter, de una galaxia distante, o de "paisajes" microscópicos como los de un virus detectado por medio de un microscopio electrónico. Más aún, sistemas o paisajes internos como son los órganos del cuerpo humano o los defectos interiores (Figura 3; véase el pliego a color) de una pieza de metal son ahora capturados utilizando detectores de rayos X. En particular, y de consecuencias socioeconómicas, le han proporcionado al hombre un conocimiento más diversificado de su medio ambiente para la evaluación y manejo de los recursos naturales terrestres.
La plataforma: a medida que la plataforma de observación se coloca a una mayor distancia de la escena, la visión de conjunto crece, pero no así el detalle o grado de discernimiento, el que consecuentemente se hace menor. Discernir objetos relativamente pequeños o muy próximos entre sí requiere de detectores de alta resolución,2 lo que hace que sean indispensables para el uso de plataformas colocadas a una gran distancia de la escena. Las que están situadas a gran altura sobre la superficie terrestre, por ejemplo, son muy útiles en la prospección de los recursos naturales y en general en la exploración de nuestro planeta. Para esta clase de aplicaciones la plataforma espacial ha demostrado ser la más adecuada, puesto que los modernos detectores permiten obtener imágenes de la superficie terrestre con elementos de resolución de 30 m por lado, cubriendo escenas de aproximadamente 185 por 185 km², es decir una superficie de 33 225 km². Otros sensores de este mismo tipo son capaces de obtener imágenes de 100 por 100 km, con un elemento de resolución de 10 por 10 m, es decir que el área mínima de observación del sensor es de 10 m por lado. Las plataformas espaciales se encuentran girando a varios cientos de kilómetros sobre la superficie terrestre, lo que hace que el detalle y la extensión cubierta con este tipo de plataformas sean muy adecuadas para aplicaciones geológicas y geofísicas. Existen, desde luego, plataformas que pueden estar a poca altura o a corta distancia de la escena, y que tienen, por tanto, otras aplicaciones. La observación de un cultivo de bacterias, por ejemplo, se hace a corta distancia, pero como la escena observada es pequeña también, de todas maneras se requiere de un detector de alta resolución para poder distinguirse los detalles más finos.
Puesto que históricamente y en general el nombre de percepción remota ha sido
tradicionalmente asociado a la exploración del planeta, veamos con más detalle
qué consecuencias tiene la utilización de la plataforma espacial en la prospección
geológica y geofísica. Una plataforma de éstas necesariamente es de tipo satelitario,
es decir, el sensor remoto se encuentra instalado a bordo de un vehículo orbital,
el cual, por medio de celdas solares, sistemas de control y telecomunicación
automatizados, proporciona la posibilidad de una cobertura regular y repetitiva
de la superficie terrestre. Las órbitas de este tipo de satélites son generalmente
polares, por lo que el movimiento combinado del satélite y el de rotación de
la Tierra (Figura 4) hacen que la superficie de ésta sea cubierta totalmente
en periodos de dos a tres semanas. Además, la órbita está ajustada de tal manera
que la observación de una misma región se hace a la misma hora del día, 10:00
hrs local aproximadamente, lo que provoca que se tenga como única variación
en las condiciones de iluminación de la escena las causadas por las estaciones
del año, sobre todo en latitudes cercanas a las polares donde el ángulo de elevación
solar varía considerablemente de verano a invierno para una misma hora del día.
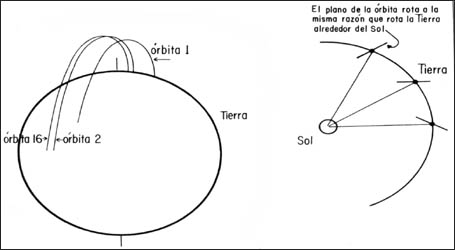
Figura 4. Esquema del cubrimiento terrestre por un satélite de
percepción remota con órbita polar.

Figura 5. Estación rastreadora de satélites de órbita polar. El plato de
esta antena va girando en dirección norte-sur para captar continuamente las
señales que envía el satélite durante su paso sobre la antena.
Otra ventaja de este tipo de satélites es que el envío de datos se hace inmediatamente a la estación terrestre más cercana (Figura 5), por lo que en principio las imágenes resultantes pueden quedar disponibles en un lapso de tiempo de algunos días.
El sistema de procesamiento: los sensores remotos actuales son capaces
de producir imágenes de alta calidad en forma analógica o digital, es decir,
pueden proporcionar una representación continua o discreta de la escena. Una
imagen continua es aquélla donde la variación de tonos de gris o color se presenta
sin discontinuidades, sin líneas, o fronteras, aparte de las que pudiera tener
la escena misma. Una imagen discreta, por su parte, es la que está compuesta
por elementos definidos y diferenciados como puntos o cuadrados. Es necesario
aclarar que una escena siempre es continua, no así la imagen respectiva. En
realidad, una representación o imagen continua no es más que una idealización
de lo que realmente sucede, pues una fotografía a simple vista podrá verse continua,
pero al ser amplificada se aprecia que está formada por una colección de pequeños
puntos de diferentes tonalidades que son los que componen la imagen en forma
similar a un rompecabezas. En general podemos decir entonces que una imagen
será catalogada continua o discreta dependiendo del grado de resolución que
tenga el sensor y del detalle que se desee discernir. De hecho, sólo las imágenes
ópticas podrán considerarse siempre como continuas. Por lo tanto, daremos el
nombre de digital a aquellas imágenes discretas donde cada punto que la compone
está dado no por una tonalidad sino por un número, esto es, asignando por ejemplo
el 0 el al tono más oscuro y 127 al más claro. Es precisamente debido a esta
representación numérica de una escena que es posible el manejo por computadora
de la imagen digital correspondiente, con la consecuente rapidez y volumen en
el análisis de una gran variedad de éstas. La disponibilidad de computadoras
digitales ha hecho que ahora se puedan analizar imágenes digitales de gran dimensión
y complejidad, lo que ha dado a la percepción remota un impulso notorio en los
últimos 10 años. Más aún, este desarrollo ha demandado recursos computacionales
cada vez más importantes, llegando a ocurrir que los especialistas en ciencias
de la computación hayan consagrado un esfuerzo considerable al diseño y construcción
de arquitecturas y lenguajes computacionales especiales para el análisis de
imágenes digitales, lo que ha propiciado lógicamente un impulso aún mayor a
la percepción remota. Estos sistemas cuentan actualmente con un rango muy amplio
de algoritmos3 para el
análisis de imágenes, los que a través de sistemas de despliegue (Figura 6)
de color de alta resolución permiten desplegar la imagen digital y proporcionan
al usuario una comunicación de tipo interactivo con la computadora. Esta comunicación
interactiva produce información, resultado de dicho análisis, que puede ser
canalizada a bancos de memoria en la misma computadora, de donde puede ser extraída,
representada o manipulada lo más adecuadamente posible para la toma de decisiones
acerca de uno o varios aspectos del paisaje. A esto último se le llama sistema
de información y convierte a la toma de decisiones en un proceso cuantitativo
y por tanto de rápido apoyo a la gestión de un recurso específico.
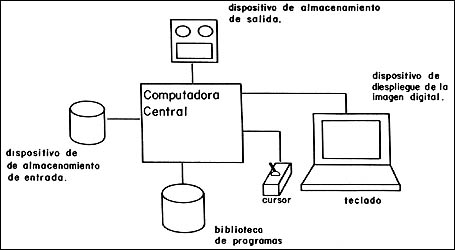
Figura 6. Representación de un sistema computacional acoplado a una pantalla
de despliegue para el análisis interactivo de imágenes digitales en actividad
de percepción remota.
El apoyo de campo: las técnicas de apoyo de campo se refieren a la inspección cualitativa y cuantitativa de lugares selectos del paisaje. Estas técnicas son resultado de los métodos de muestreo estadístico y de medidas de propiedades físicas y químicas de los objetos que se encuentran en la escena. Es claro que no es posible ni tiene sentido hacer una evaluación exhaustiva de todos los objetos que se presentan en ésta pues, además de que esto sería costoso y consumiría una gran cantidad de tiempo, dejaría de lado a la percepción remota, es decir, ya no tendría razón de ser la observación a distancia desde una plataforma particular. Sin embargo, la observación directa de ciertos puntos de la escena es necesaria para la correcta validación de las observaciones. Esto es así porque las medidas hechas por un sensor remoto son en general relativas al sensor mismo, a la metodología usada y pueden estar distorsionadas por una gran variedad de aspectos no controlables por el experimentador, tales como interferencia atmosférica si se trata de una plataforma satelitaria, o de interferencia de los tejidos blandos si se trata de obtener una radiografía. A partir de los hechos arriba mencionados se desprende la necesidad de seleccionar un conjunto adecuado de puntos de la escena que constituyan una representación realista del conjunto total que la componen, lo que se logra con bastante exactitud por medio de técnicas de muestreo estadístico, que son las que proporcionan los criterios pertinentes para hacerlo. Una vez seleccionado un número adecuado de puntos y habiendo determinado sus posiciones respectivas se pasa a localizar los objetos que se encuentran sobre dichos puntos. Hecho esto, se puede medir directamente una serie de propiedades de los objetos en cuestión. De esta manera, en el caso de una radiografía, por ejemplo, una vez localizada una zona sospechosa, se pasa a la extracción de un poco de tejido para someterlo al análisis de laboratorio, cuyos resultados determinarán la acción correctiva adecuada. En el caso de estudios de silvicultura desde una plataforma satelitaria, se procederá a inspeccionar un cierto número de árboles, y suponiendo que éstos se encuentren infestados por una plaga, determinando propiedades como área foliar, diámetro mayor del tronco o estado de salud. Todos estos datos son retroalimentados al sistema computacional, el que, correctamente programado, dará la localización y extensión de un tumor, o proporcionará las zonas de árboles enfermos. Desde luego, habrá ocasiones en las que el apoyo de campo no es posible o es demasiado costoso, en cuya situación las inferencias que se hagan sobre la escena y el paisaje tendrán que ser indirectas. Éste es el caso, por ejemplo, de regiones de difícil acceso en el planeta o de cuerpos celestes muy alejados. Aquí es muy importante puntualizar que ni la medicina, ni la astronomía se han convertido en percepción remota o ésta en astronomía y medicina, sino que aquélla es una metodología científica multidisciplinaria cuyas técnicas y métodos son aplicables a diversas áreas del conocimiento científico.
El nombre de percepción remota aparece inicialmente durante las primeras misiones interplanetarias de sondas espaciales no tripuladas, a bordo de las cuales se instalaron cámaras de televisión para la captura y envío a la tierra de imágenes correspondientes a regiones selectas de la superficie de otros planetas. El desarrollo de esta ciencia, por su aplicación novedosa a la geología y a la geofísica, se ha visto involucrado tradicionalmente al estudio de la superficie planetaria terrestre. De ahí que la percepción remota se haya definido en su desarrollo histórico como la obtención de información acerca de una superficie o escena, utilizando luz visible e invisible, por medio del análisis automatizado de datos obtenidos a distancia por un sensor remoto. Esto se ha hecho, en general, con el fin de evaluar el medio ambiente y, en muchas ocasiones, con el objeto de apoyar las labores de prospección de los recursos terrestres, lo que la ha convertido en una herramienta valiosa para el bienestar de la humanidad. De hecho, el avance tan grande que ha tenido la tecnología asociada a la percepción remota ha traído como consecuencia que el método propio de esta moderna ciencia sea aplicable a una gran variedad de escenas y paisajes, y que la evaluación ya no se restrinja solamente al medio ambiente, sino que se pueda realizar en una gran diversidad de sistemas físicos.
NOTAS
1 Entendemos por objeto aquí todo ente físico (material) formado, en general, por una gran variedad de elementos químicos y físicos.
2 Por resolución se entiende aquí la capacidad de un sistema sensor para separar los elementos de un objeto bien definido como una sucesión de líneas equidistantes.
3 Un algoritmo es una sucesión lógica de
instrucciones que, traducidas por medio de un lenguaje de computadora como el
FORTRAN, proporciona al sistema computacional las órdenes necesarias para ejecutar
una tarea específica.



